At the 1939 New York World’s Fair, General Motors unveiled its vision of a future world that supported smart highways and self-driving cars. Although that dream has yet to emerge some 80 years later, autonomous car technology has advanced considerably.Networks of sensors—including cameras that read road and traffic signs, ultrasonics that sense nearby curbs, laser-based lidar for seeing 200 meters out or more, and radar that measures range and velocity—are being developed to assist drivers. Paired with artificial intelligence, these technologies help drivers park, back up, brake, accelerate, and steer; detect lane boundaries; and even prevent sleepy motorists from drifting off behind the wheel.
Nearly 36,000 people in the United States died in traffic accidents in 2018—with more than 90% of those accidents caused by human error.

虽然这些进步尚未完全取代驾驶员座位中的人,但这样做可以挽救生命。根据国家公路交通安全管理局的最新数字,美国近36,000人在2018年的交通事故中死亡 - 超过90%的人为错误造成的事故。在过去的十年中,行人死亡人数已在35%上升,每年达到6,000多个。车辆感知技术可以“看到”其周围的环境优于人类,并更快地反应可能会显着减少伤害和死亡。
虽然有一致认为,感知技术将超越人类的人类能力,从而达到驾驶环境,这就是协议结束的地方。汽车行业尚未达成一项技术的共识,这些技术将导致我们进入无人驾驶汽车时代。实际上,解决方案可能需要多个。以下是三家技术公司推进车辆感知,以迎来迎来完全自主的自动驾驶汽车的未来。
“We’re focused on long range and high resolution, which is the very hardest problem in automotive radar.”
Abdullah Zaidi,工程师,Metawave主任
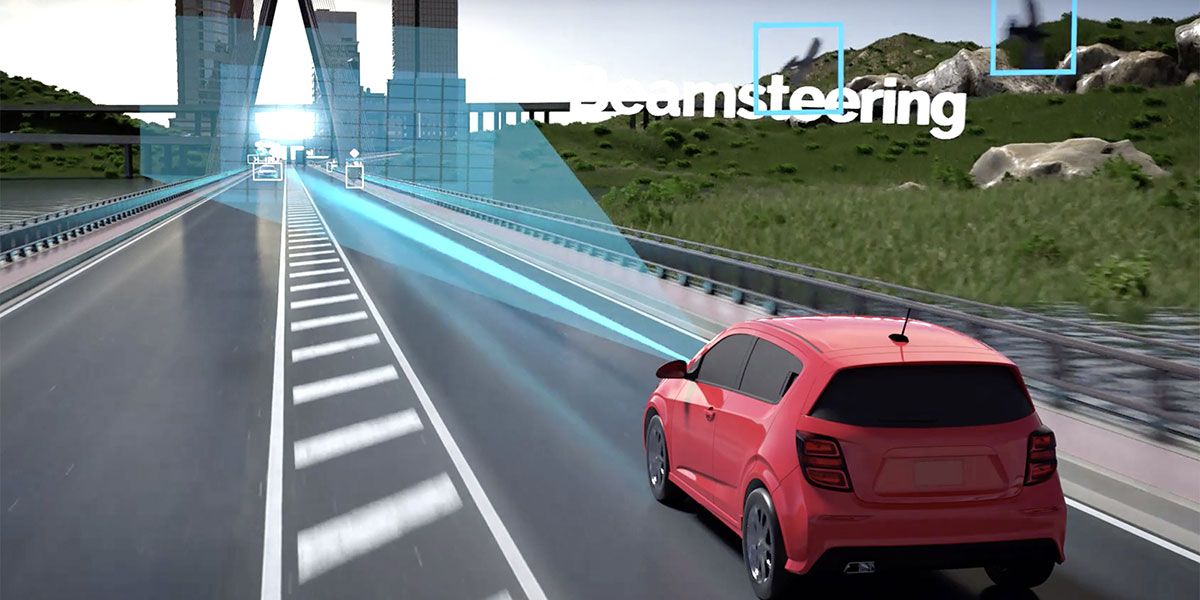
Beamsteering雷达
自20世纪初以来,雷达已被用来帮助船舶和飞机导航。它能够在复杂条件下检测和识别目标并提供准确的速度信息使其成为自主驾驶的理想选择。
加利福尼亚州的工程师metawave.are pushing the limits of radar to recognize other autos, pedestrians, stationary surroundings, road hazards, and more in all weather conditions and in the dark of night. Its analog radar platform, called SPEKTRA™, forms a narrow beam and steers it to detect and classify objects within milliseconds. Abdullah Zaidi, director of engineering at Metawave, says their technology is the highest-resolution analog radar in the automotive sector. It can see pedestrians 250 meters away and recognize vehicles 330 meters away.
它还可以精确测量小距离的赌注ween two objects, called angular resolution, which gives the radar the ability to distinguish one object from another. “This is not something that current radars can do,” says Zaidi.
Metawave利用机器学习和AI构建模拟分子雷达系统。图片信用:Metawave Corp.
Spektra扫描环境的方式也不同。与捕获所有信息的传统数字雷达系统不同,类似于强大的Flashbulb照明场景,Metawave的雷达更像是一次性的激光束,一次能够看到一个特定的空间部分。光束迅速扫描环境,检测和分类车辆在毫秒内的所有对象。Metawave的方法增加了范围和准确性,同时减少了干扰和杂乱的概率,所有这些都具有很少的计算开销。“我们专注于远程和高分辨率,这是今天在汽车雷达中解决的最难的问题,”Zaidi说。
Metawave工程师使用MATLAB®测试Spektra雷达的范围和分辨率,并创建处理雷达输出的底层算法。该技术为汽车提供自动驾驶功能,如左转辅助,盲点监控,自动应急制动,自适应巡航控制和车道辅助。
聪明的潮流乐
一些第一个自驾车是由美国国防高级研究项目局(DARPA)赞助的竞争的一部分,使用基于激光的系统来“见”环境。光检测和测距(LIDAR)感测系统每秒散发数千个脉冲,并反射围绕物体并反射回车辆。在那里,计算机使用称为体素的每个数据点来重建环境的三维图像,并最终控制汽车的移动方式。

IDAR在航空航天和国防行业找到了强大的传感能力到汽车市场。图片信用:AEYE,Inc。
恒星昂贵,每辆车超过70,000美元。并单独使用它有其局限性。恶劣天气干扰了该信号,因此它通常与其他传感技术相结合,例如摄像机,雷达或超声波。但是,可以产生一个压倒性的冗余和无关的信息,即中央计算机必须解析,Barry Behnken,Cofounder和高级副总裁Aeye., based in Dublin, California.
“我们的终极目标是制定一个比人类更好或更好的感知系统。”
Barry Behnken,Cofounder和Aeye高级副总裁
使用高分辨率摄像机将其融合,工程师通过融合了先进的LIDAR功能。他们的系统称为IDAR,用于智能检测和测距,创建了一种新型数据点,该数据点与LIDAR的3D体素合并来自数码相机的高分辨率像素。他们称这些点是动态的vixels。因为激光脉冲和摄像机通过相同的光圈收集光学信息,所以数据流被集成并且可以同时分析,这节省了时间和处理能力。
Unlike traditional lidar systems, which scan a scene equally across the whole environment, iDAR adjusts its light-pulsing patterns to give key areas of the scene more attention. Where to direct the pulses is determined by AEye’s computer vision algorithms. They first analyze the camera data to search for and detect the edges of objects and then immediately zero in with the higher-resolution lidar scans to classify, track, and predict the motion of those objects. Engineers use MATLAB to ensure that the algorithms are scanning the scene using the best, most efficient light-pulsing pattern possible.
“我们正在尝试在传感器方面做出尽可能多的感知,以减少车辆中央计算侧的负荷,”Behnken说。他说,捕获更好的信息更快地导致更准确的感知,同时使用比传统解决方案更少的激光功率。金宝搏官方网站“我们的终极目标是制定一个像人类一样好或更好的感知系统,”他说。
通过选择性地分配额外的延期郎IDAR中的对象周围的镜头可以对这些对象进行分类并计算方向和速度。图片信用:AEYE,Inc。
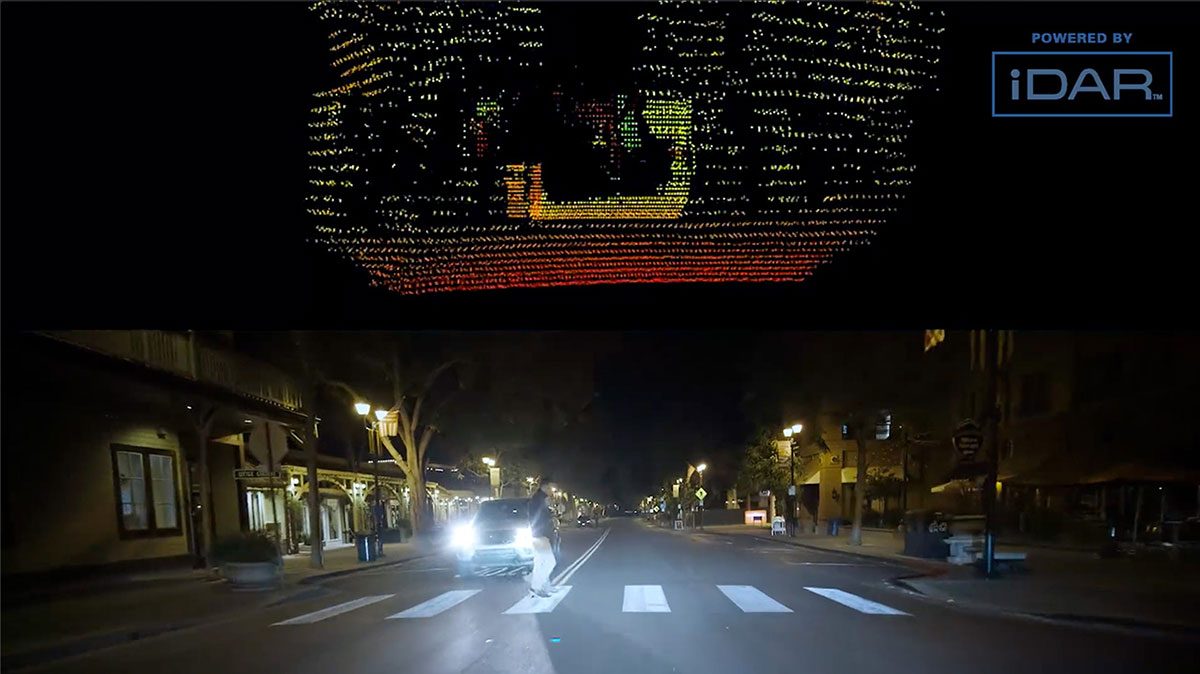
热浪
LIDAR,雷达和摄像机技术的进步将有助于将自动驾驶技术转移到未来。但没有传感器可以单独完成工作。“他们都有他们的优势,他们都有他们的弱点,”副总裁兼首席技术官Gene Petilli说猫头鹰自治成像,总部设在纽约罗马波特。
Petilli说,传统的激光乐队非常准确,但雪,雨和雾减少了从无生命物体中讲述动画的能力。另一方面,传统的雷达可以通过雪,距离距离优异,并且可以判断对象的相对速度,但它独自不能区分这些物体的内容。相机可以分类以及读取红绿灯和街道标志,但眩光会扰乱质量,晚上,他们只能看到大灯照亮的内容。
来自原型猫头鹰AI的热成像。观看原型系统的完整视频。Video Credit: Owl Autonomous Imaging
“Autonomous vehicles won’t be accepted by the public until they are safer than a human driver.”
Gene Petilli, vice president and CTO at Owl AI
“诀窍是选择一套没有同样弱点的传感器套件,”佩蒂利说。
Owl AI’s team fills in the gaps with 3D thermal imaging, which senses heat signatures given off by people and animals, and greatly simplifies object classification. Called Thermal Ranging™, the company’s sensor is a passive system—meaning it doesn’t have to emit energy or light and wait until it bounces back—that can pick up the infrared heat of a living object. It sees the object, whether it’s moving or stationary, in day or night and in any weather conditions, up to 400 meters away, and can calculate the object 3D range and velocity up to 100 meters away.
该装置由主要透镜制成,类似于常规相机中的发现,以及位于主透镜和检测器之间的非常小的镜片阵列。该阵列将场景分成了图像的马赛克,每一个看感兴趣的对象不同的角度。算法测量图像之间的微妙差异来计算对象的距离。
Petilli说该公司正在使用Matlab来完善系统。因为他们试图测量微透镜阵列中的元素之间的非常小的差异,所以镜头中的任何失真都可以在范围计算中产生错误。因此,它们在Matlab中模拟了整个系统,以完善校正镜头失真的算法。它们还运行驾驶模拟以培训创建3D热图像的深神经网络AI算法。深度学习将用于评估神经网络算法以将图像的马赛克转换为3D地图。
“公众不会被公众接受自动车辆,直到它们比人类司机更安全,”Petilli说。
Enhancing Safety
车辆感知技术是提供安全自动驾驶体验的关键。为了提供完全自主,自动驾驶汽车的承诺,科技公司正在使用AI和计算机愿景来帮助车辆看到和感知他们的环境。虽然尚可完全自主汽车不是常态,但这些公司正在为我们越来越近,同时提高新车的安全系统。