帮助中心帮助中心
深入学习算法适用于处理激光雷达点云数据通过使用深度学习工具箱™和激光雷达的工具箱™。
全部展开
pointPillarsObjectDetector
trainPointPillarsObjectDetector
检测
squeezesegv2Layers
pointnetplusLayers
火车Complex-YOLO v4网络对点云进行目标检测。
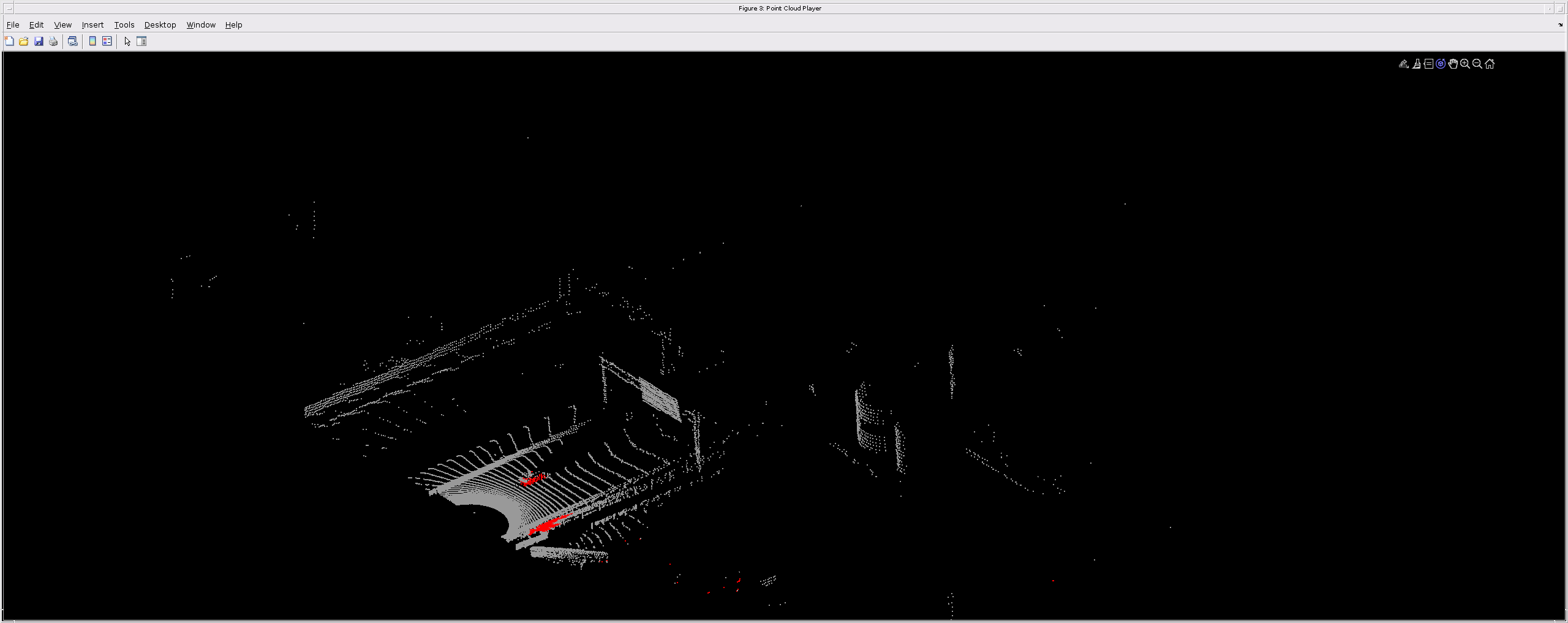
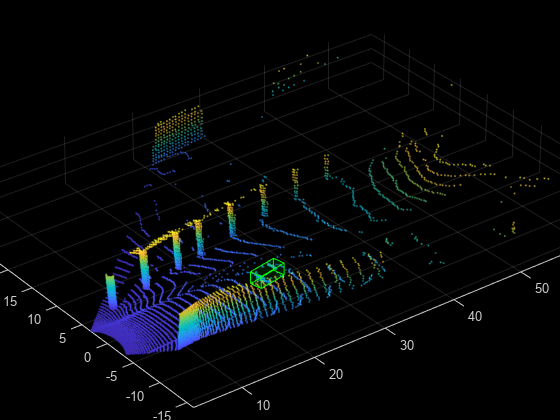
代码生成CUDA®墨西哥人对激光雷达目标检测网络。在这个例子中,你第一次段pretrained网络的点云,然后集群点和3 d边界盒适合每个集群。最后,您生成网络的墨西哥人代码。
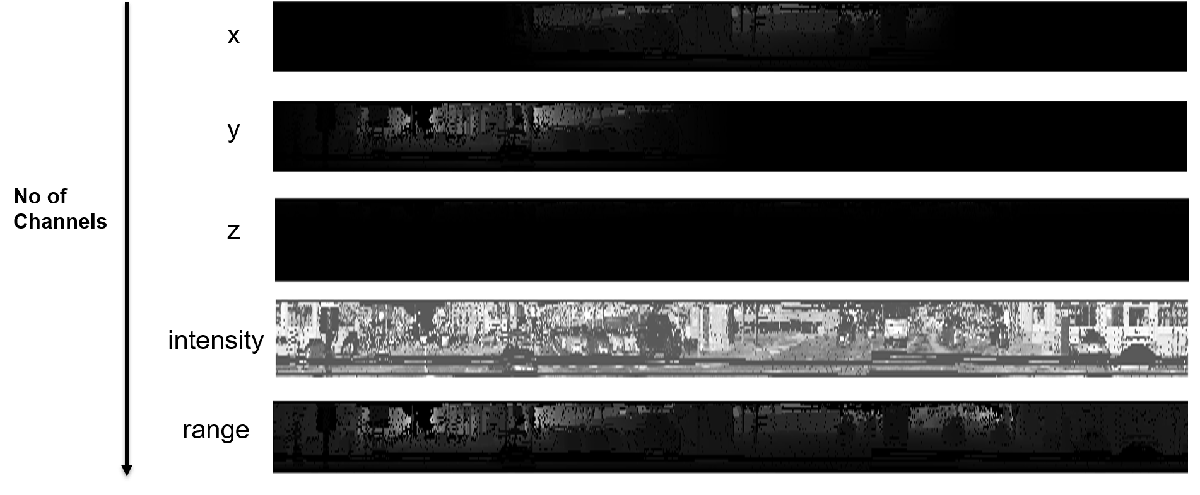
组织训练PointSeg语义分割网络三维激光雷达点云数据。
组织训练SqueezeSegV2语义分割网络三维激光雷达点云数据。
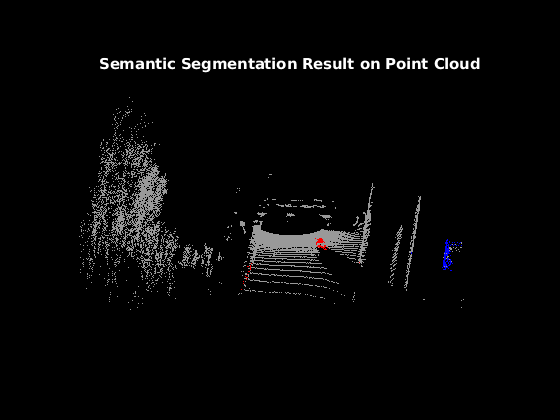
生成CUDA®墨西哥人代码为激光雷达深度学习网络的语义分割。这个示例使用pretrained SqueezeSegV2[1]网络能段组织激光雷达点云属于三个类(背景、汽车和卡车)。信息在网络的训练过程,看到激光雷达点云分割使用SqueezeSegV2深度学习网络。生成的墨西哥人代码需要点云作为输入,并对点云执行预测使用DAGNetwork SqueezeSegV2网络对象。
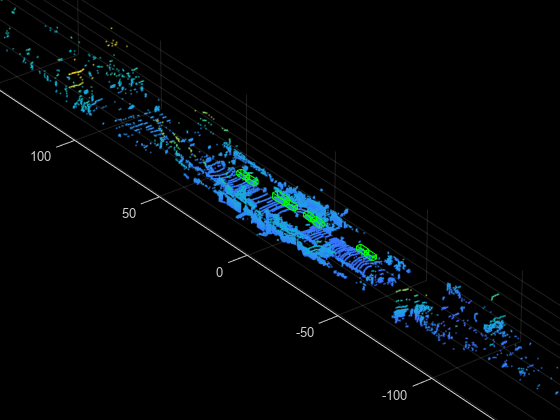
火车PointNet + +深学习网络上执行语义分割航空激光雷达数据。
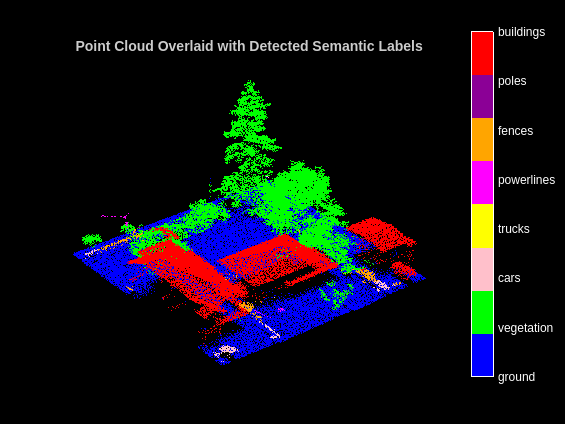
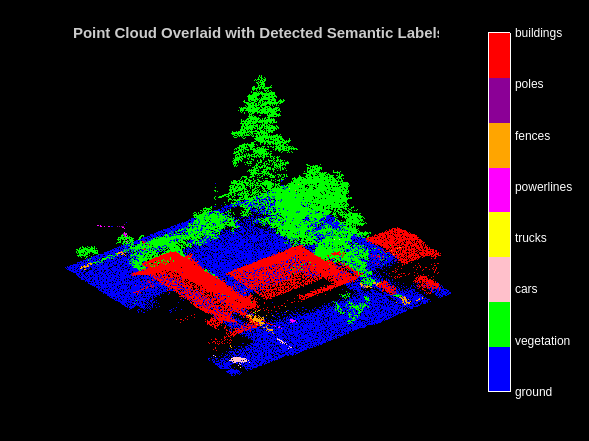
生成CUDA®墨西哥人代码PointNet + +[1]激光雷达网络的语义分割。这个示例使用pretrained PointNet + +网络,可以段无组织的激光雷达点云属于八类(建筑、汽车、卡车、波兰人,电线,围栏,地面和植被)。PointNet + +网络的更多信息,见开始使用PointNet + +。
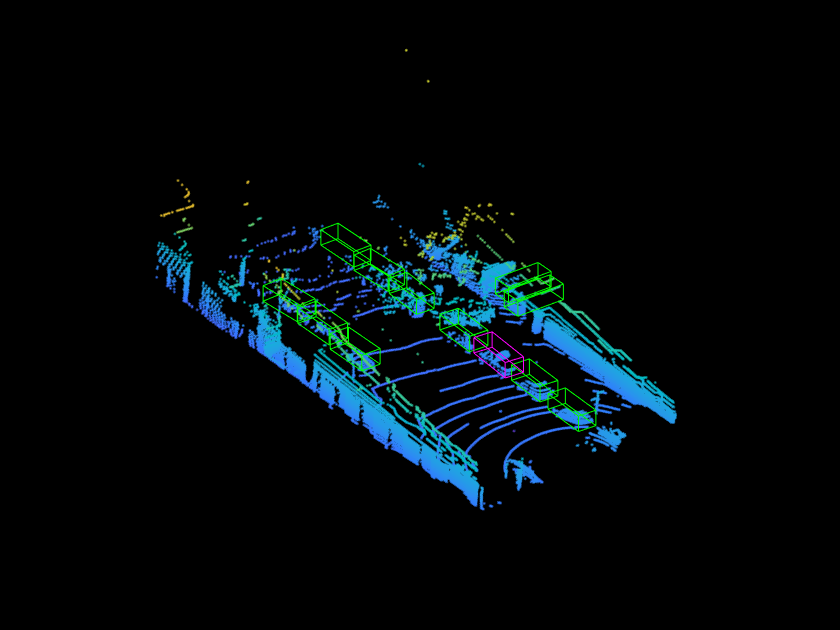
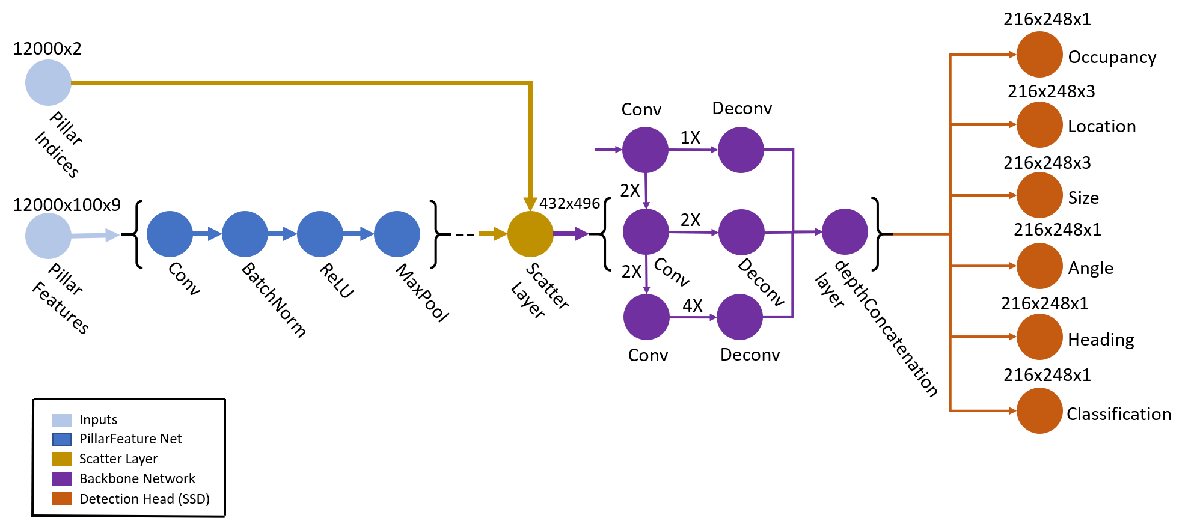
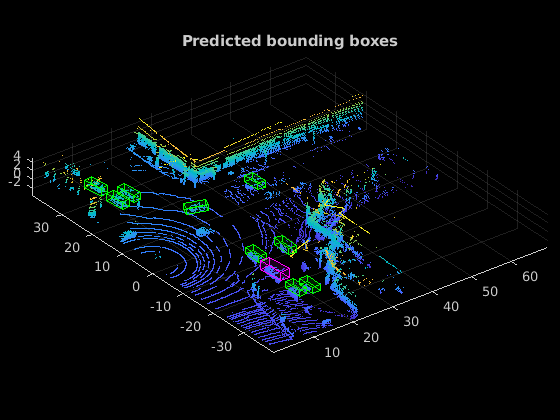
火车PointPillars网络对象检测的点云。
生成CUDA®墨西哥人PointPillars对象探测器。有关更多信息,请参见使用PointPillars激光雷达三维物体探测激光雷达工具箱™深度学习的例子。
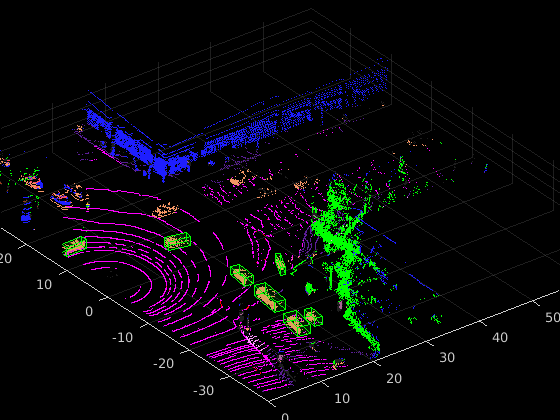
执行典型的数据增强3 d对象检测工作流技术与激光雷达数据。
自动化汽车检测一个点云使用pretrained pointPillarsObjectDetector激光雷达贴标签机中的应用。激光雷达中的示例使用AutomationAlgorithm接口贴标签机应用自动化标签。
你点击一个链接对应MATLAB命令:
运行该命令通过输入MATLAB命令窗口。Web浏览器不支持MATLAB命令。金宝app
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室