主要内容
在惯性传感器融合中利用残差滤波检测多路径GPS读数误差
这个例子展示了如何使用residualgps目标函数和残余滤波检测时,新的传感器测量可能不一致的当前滤波状态。
载荷轨迹和传感器数据
加载MAT-fileloggedDataWithMultipath.mat.该文件包含模拟的IMU和GPS数据,以及圆形轨迹的地面真实位置和方向。GPS数据包含了由于在一段轨迹中的多路径误差而产生的误差。这些误差通过在GPS数据中加入白噪声来模拟城市峡谷的影响。
负载(“loggedDataWithMultipath.mat”,...“imuFs”,“加速”,“陀螺”,...% IMU数据“gpsFs”,“lla”,“gpsVel”,...%的GPS数据“truePosition”,“trueOrientation”,...地面真位“localOrigin”,“initialState”,“multipathAngles”)%每个GPS样本的IMU样本数量。imuSamplesPerGPS = (imuFs / gpsFs);%第一和最后索引对应多路径错误。multipathIndices = [1850 2020];
融合滤波器
创建两个姿态估计滤波器使用insfilterNonholonomic对象。使用一个过滤器来处理所有传感器读数。使用另一个过滤器只处理不被认为是异常值的传感器读数。
%创建过滤器。%使用此过滤器只处理未检测到的传感器读数%离群值。gndFusionWithDetection = insfilterNonholonomic (“ReferenceFrame”,“ENU表示”,...“IMUSampleRate”imuFs,...“ReferenceLocation”localOrigin,...“DecimationFactor”2);%使用此过滤器处理所有传感器读数,无论是否他们不是局外人。gndFusionNoDetection = insfilterNonholonomic (“ReferenceFrame”,“ENU表示”,...“IMUSampleRate”imuFs,...“ReferenceLocation”localOrigin,...“DecimationFactor”2);% GPS测量噪声。Rvel = 0.01;rpo = 1;%这个过滤器的地面车辆的动力学模型假设有运动过程中无侧滑或打滑。这意味着速度是%限定为身体的前向轴。另外两个速度轴%读数用加权的零测量进行校正% | ZeroVelocityConstraintNoise |参数。gndFusionWithDetection。ZeroVelocityConstraintNoise = 1飞行;gndFusionNoDetection。ZeroVelocityConstraintNoise = 1飞行;%过程噪音。gndFusionWithDetection。GyroscopeNoise = 4 e-6;gndFusionWithDetection。GyroscopeBiasNoise = 4 e-14;gndFusionWithDetection。AccelerometerNoise = 4.8依照;gndFusionWithDetection。AccelerometerBiasNoise = 4 e-14;gndFusionNoDetection。GyroscopeNoise = 4 e-6;gndFusionNoDetection。GyroscopeBiasNoise = 4e-14; gndFusionNoDetection.AccelerometerNoise = 4.8e-2; gndFusionNoDetection.AccelerometerBiasNoise = 4e-14;%初始过滤状态。gndFusionWithDetection。状态= initialState;gndFusionNoDetection。状态= initialState;%初始误差协方差。gndFusionWithDetection。StateCovariance = 1 e-9 * 1 (16);gndFusionNoDetection。StateCovariance = 1 e-9 * 1 (16);
初始化范围
的HelperPoseViewer范围允许三维可视化比较过滤器估计和地面真实。使用多个范围会减慢模拟的速度。要禁用范围,请将相应的逻辑变量设置为假.
usePoseView = true;打开3D姿势查看器如果使用视图[viewerWithDetection, viewerNoDetection, nohandle]...= helperCreatePoseViewers (initialState multipathAngles);结束
模拟循环
主要的仿真循环是为嵌套循环为循环。的位置执行第一个循环gpsFs,即GPS测量速率。嵌套循环在imuFs,即IMU采样率。每个范围都按照IMU采样率进行更新。
numsamples =元素个数(trueOrientation);numGPSSamples = numsamples / imuSamplesPerGPS;%记录最终度量计算的数据。estPositionNoCheck = 0 (numsamples, 3);estOrientationNoCheck =四元数。0 (numsamples, 1);estPosition = 0 (numsamples, 3);estOrientation =四元数。0 (numsamples, 1);%离群残差阈值。residualThreshold = 6;idx = 0;为sampleIdx = 1: numGPSSamples%在IMU更新频率预测循环。为i = 1:imuSamplesPerGPS idx = idx + 1;%使用预测方法估计基于滤波器的状态%在accelData和gyroData数组上。预测(gndFusionWithDetection accel (idx:),陀螺(idx:));预测(gndFusionNoDetection accel (idx:),陀螺(idx:));%记录估计的方向和位置。: [estPositionNoCheck idx), estOrientationNoCheck (idx:)]...=姿势(gndFusionWithDetection);: [estPosition idx), estOrientation (idx:)]...=姿势(gndFusionNoDetection);%更新姿势查看器。如果usePoseView viewerWithDetection (estPositionNoCheck (idx:)...estOrientationNoCheck (idx:)...truePosition (idx:), trueOrientation (idx:));viewerNoDetection (estPosition (idx:)...estOrientation (idx:), truePosition (idx:)...trueOrientation (idx:));结束结束%下一段代码以GPS采样率运行。%根据GPS数据更新过滤器状态。fusegps (gndFusionWithDetection lla (sampleIdx:), rpo,...gpsVel (sampleIdx:), Rvel);%检查当前GPS读数的归一化残差。如果%值太大,会被认为是离群值而忽略。[res, resCov] = residualgps(gndFusionNoDetection, lla(sampleIdx,:),...rpo, gpsVel (sampleIdx:), Rvel);normalizedRes = res(1:3) ./ sqrt(diag(resCov(1:3,1:3))。”);如果(所有(abs (normalizedRes) < = residualThreshold))%根据GPS数据更新过滤器状态。fusegps (gndFusionNoDetection lla (sampleIdx:), rpo,...gpsVel (sampleIdx:), Rvel);如果usePoseView集(annoHandle,“字符串”,异常状态:没有的,...“EdgeColor”,“k”);结束其他的如果usePoseView集(annoHandle,“字符串”,异常状态:检测到的,...“EdgeColor”,“r”);结束结束结束


误差指标计算
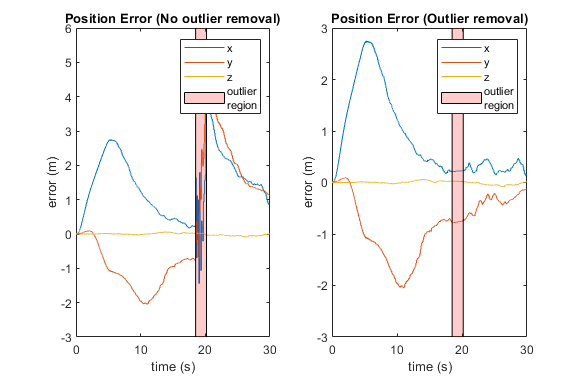
计算两个滤波器估计的位置误差。不检查GPS测量中任何异常值的滤波器的位置误差增加了。
%计算位置误差。posdNoCheck = estPositionNoCheck - true;posd = estPosition - true;%的阴谋的结果。t =(0:大小(posd, 1) 1)。”。/ imuFs;图(“单位”,“归一化”,“位置”, [0.2615 0.2833 0.4552 0.3700]) subplot(1,2,1) plot(t, posdNoCheck) ax = gca;yLims =得到(ax,“YLim”);持有在mi = multipathIndices;填充([t (mi(1))、t (mi(1))、t (mi(2))、t (mi (2))], [7 5 5 7),...(1 0 0),“FaceAlpha”,0.2);集(ax,“YLim”, yLims);标题(“位置误差(没有异常值移除)”)包含(“时间(s)”) ylabel (“错误(m)”)传说(“x”,“y”,“z”sprintf (“离群值\ nregion”)) subplot(1,2,2) plot(t, posd) ax = gca;yLims =得到(ax,“YLim”);持有在mi = multipathIndices;填充([t (mi(1))、t (mi(1))、t (mi(2))、t (mi (2))], [7 5 5 7),...(1 0 0),“FaceAlpha”,0.2);集(ax,“YLim”, yLims);标题(“位置误差(离群值移除)”)包含(“时间(s)”) ylabel (“错误(m)”)传说(“x”,“y”,“z”sprintf (“离群值\ nregion”))
结论
的residualgps目标函数可用于检测传感器测量中的潜在异常值,然后使用它们更新滤波器状态insfilterNonholonomic对象。其他的姿态估计滤波器对象,比如,insfilterMARG,insfilterAsync,insfilterErrorState也有类似的目标函数来计算传感器的测量残差。
你也可以从以下列表中选择一个网站: