扫描雷达模式配置
这个例子向您展示了如何使用模型不同的雷达扫描模式fusionRadarSensor。这个例子展示了如何配置fusionRadarSensor几个常用的雷达扫描模式。使用这个模型,可以模拟机械扫描雷达,电子扫描,同时使用机械和电子扫描。扫描限制在方位角和高度可配置的机械和电子扫描模式。
机械旋转
360度方位扫描
360度方位扫描模式常见的地面和机载雷达。这种模式提供了360度监测机械扫描雷达天线的方位角。在这种模式下,雷达通常采用扇形波束,在方位有一个狭窄的视野,但涵盖了广泛的海拔跨度。这些雷达提供准确的距离和方位测量,但通常不报告高程探测到的目标。360度方位扫描雷达的一个常见的例子是机场监视雷达。
使用的函数helperScanRadarModesExample创建一个trackingScenario与挂载雷达平台和三个目标。这个函数还设置一个theaterPlot显示的位置目标,雷达的波束和瞄准线位置,生成的探测雷达。
你可以了解更多关于使用trackingScenario和theaterPlot从介绍追踪场景和模拟传感器检测的例子。
%初始化的模拟和theaterPlot trackingScenario%的可视化ts = trackingScenario;(平台、无花果)= helperScanRadarModesExample (“设置跟踪场景”、ts);%设置随机种子可重复的结果rng (2018)
创建一个机械旋转雷达天线在方位360度。山这15米以上的平台和一个-135度的偏航平台的轴。增加方位的视野更好的可见性的显示数据。
%创建一个360度旋转雷达机械雷达= fusionRadarSensor (1,“旋转”);%定位雷达15米高的平台雷达。MountingLocation = [0 0 -15);%雷达,偏航-135度旋转平台的轴radar.MountingAngles (1) = -135;%设置雷达的方位的视野5度显示更大的光束radar.FieldOfView (1) = 5;%显示配置雷达雷达
雷达与属性= fusionRadarSensor: SensorIndex: 1 UpdateRate: 1 DetectionMode:“单站”ScanMode:“机械”InterferenceInputPort: 0 EmissionsInputPort: 0 MountingLocation: [0 0 -15] MountingAngles: [-135 0 0] FieldOfView: 10.0000 [5] LookAngle: [0 0] RangeLimits: 100000年[0]DetectionProbability: 0.9000 FalseAlarmRate: 1.0000 e-06 ReferenceRange: 100000 TargetReportFormat:集群检测的使用显示所有属性
配置雷达机械扫描的速度2 rpm。在这种模式下,雷达时间表梁在每个间隔的住雷达的方位的视野。然后计算雷达的更新率所需的扫描速率及其方位的视野。
rpm = 2;fov = radar.FieldOfView;scanrate = rpm * 360/60;%度/秒updaterate = scanrate /视场(1)%赫兹雷达。UpdateRate = UpdateRate;
updaterate = 2.4000
使用trackingScenario模拟场景中的运动目标并生成使用机械旋转雷达探测模型。helperScanRadarModesExample用于更新吗theaterPlot与平台位置,雷达波束和瞄准线位置,检测每一步生成的模拟。
%配置trackingScenario雷达的更新速度。ts.UpdateRate = radar.UpdateRate;%运行仿真图(图);标题(“360度方位扫描”);而推进(ts) & & ishghandle(图)%当前仿真时间simTime = ts.SimulationTime;%当前目标位置目标= targetPoses(平台);%生成目标检测当前扫描的位置依据=雷达(目标,simTime);%更新显示helperScanRadarModesExample (“显示更新”、ts、平台、雷达、依据);%对入站快照检测目标任何(cellfun takeSnapshot = simTime > 5 & & (@ (d) d.ObjectAttributes {1} .TargetIndex,侦破)= = 2);了= helperScanRadarModesExample (“快照”无花果,takeSnapshot);如果了关闭(图);结束结束

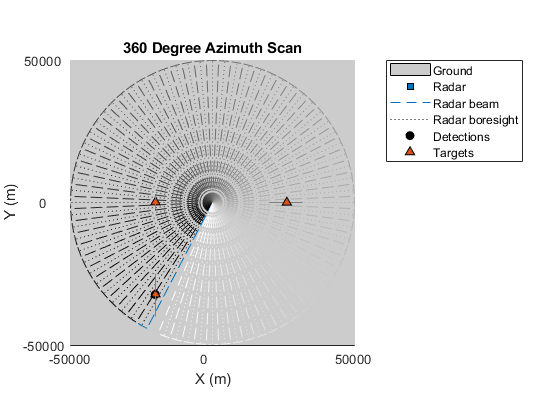
之前的数据显示,检测入站的目标在3 d和2 d视图。入站雷达目标检测的光束扫过自己的立场。雷达的瞄准线显示为黑色,虚线。雷达的当前梁显示为蓝色,虚线。梁的历史和孔径位置灰度所示,与最近的位置显示为黑色和年长的职位褪成白色。
与倾斜360度方位扫描高度覆盖
在前面的部分中,雷达的天线的孔径(黑色虚线)约束躺在水平面,导致一半的雷达波束定向低于水平面。如果你建模地面雷达,你可能想要向上倾斜雷达的孔径,因此只有该地区地面调查的雷达。相反,对于一个机载平台,您可能希望点向下雷达的波束,调查目标海拔低于雷达平台。
倾斜的孔径雷达天线,这样所有的海拔跨度的梁在地上。要做到这一点,使至机械扫描雷达和设置的高度限制搜索的仰角的视野。然后设置高程的视野为略大于高程由机械扫描限制张成这样没有执行的光栅扫描雷达光栅扫描是解决下一节)。
如前所述,雷达时间表梁间距的方位角和仰角的视野覆盖整个机械扫描的限制。通过设置高程的视野要比机械仰角扫描限制,雷达的地方中间的梁的机械扫描限制。
这个配置已经设置当您创建了雷达使用旋转器的配置。所有你需要做的是使海拔。
释放(雷达);雷达。HasElevation = true;%确定机械扫描限制雷达。MechanicalAzimuthLimits radar.MechanicalElevationLimits
= 0 360岁= -10 0
%确定高程的视野比海拔略大%由扫描限制张成这样光栅扫描不执行elSpan = diff (radar.MechanicalElevationLimits) isLarger = radar.FieldOfView (2) > elSpan
elSpan = 10 isLarger =逻辑1
使用helperScanRadarModesExample函数运行仿真是由前面小节中使用while循环。
helperScanRadarModesExample (运行仿真的、ts、平台、雷达、2);


在前面的数字,你观察到天线倾斜向上,这样不直接低于地面雷达能量。整个雷达波束(蓝色虚线)位于离地面。
360度方位和仰角光栅
有时一个雷达必须执行360度监测覆盖一个地区可以跨越大于其海拔的视野。在这种情况下,雷达机械旋转方位和机械步骤的天线高度在每个360度扫描。这是一种光栅扫描每个光栅栏由雷达间隔的仰角的视野在雷达仰角扫描限制。
设置雷达扫描离地面10度区域使用一束在海拔跨度5度。这产生3海拔光栅酒吧在0、5、-10度仰角。
释放(雷达);elFov = 5;%度radar.FieldOfView (2) = elFov;雷达。MechanicalElevationLimits = [-10 0] -elFov / 2;%增加雷达的扫描速率显示2完整的周期%光栅扫描模式。rpm = 5;fov = radar.FieldOfView;scanrate = rpm * 360/60;%度/秒updaterate = scanrate /视场(1);%赫兹雷达。UpdateRate = UpdateRate;%运行仿真helperScanRadarModesExample (运行仿真的、ts、平台、雷达、3);


前两个数据显示,雷达的波束位置。左边的图显示了梁位置梁卸任了从第一到第二个光栅酒吧(注意步骤在海拔中间的图)。右边的图显示了梁位置在前面的光栅扫描完成后。在这种情况下,雷达是加大从第三第二光栅光栅酒吧酒吧。每个光栅栏之间的距离是雷达仰角的视野。
扇形扫描
机械方位扇形扫描
扫描一个完整的360度部门耗费时间。如果感兴趣的目标是占据一个较小的区域,通常使用一个扇形扫描。通过扫描在一个较小的方位角,实现高更新率为每个目标领域内不增加机械扫描雷达的速度。
设置雷达扫描90度方位部门通过设置机械扫描的极限跨度45度两侧雷达的安装方向。禁用高度限制雷达波束的水平面。
设置一个fusionRadarSensor这个配置通过指定的“部门”配置雷达。
雷达= fusionRadarSensor (1,“部门”,“MountingAngles”(-135 0 0),“MountingLocation”,(0 0 -15));%设置雷达的方位的视野5度显示更大的光束radar.FieldOfView (1) = 5;%更新率设置为显示多个扇形扫描的周期rpm = 2;fov = radar.FieldOfView;scanrate = rpm * 360/60;%度/秒updaterate = scanrate /视场(1);%赫兹雷达。UpdateRate = UpdateRate;%运行仿真helperScanRadarModesExample (运行仿真的、ts、平台、雷达、4);



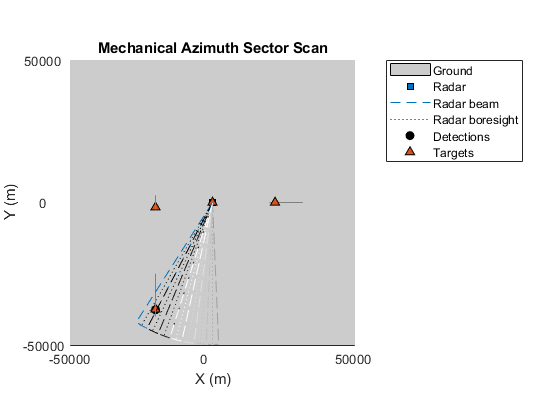
第一行的第一扫描方位部门的数据显示,与光束穿过部门从左边到右边的图。最后一行显示了扫描方位部门后,机械扫描的方向逆转,遍历图从右到左。
再次,一半的雷达波束低于水平地平面。你可以机械地倾斜光束向上或向下使用前一节中使用相同的技术与倾斜360度方位扫描高度覆盖。
机械与电子仰角扫描方位扇形扫描
一些雷达扫描电子机械在方位和堆栈多个光束在海拔天线的孔径。这避免了需要执行一个光栅扫描慢慢寻找感兴趣的地区。电子控制和处理多个光束在一个单一的居住位置需要更复杂的天线硬件和信号处理算法,但每个目标提供了更高的更新率。
配置雷达机械扫描波束的方位,同时处理10度仰角的视野通过电子叠加多个仰角束在每一个停留的位置。
释放(雷达);%使机械和电子扫描雷达。ScanMode =“机电”;%启用仰角扫描和测量雷达。HasElevation = true;%仰角扫描电子执行。设置电子%方位角扫描限制为0禁用电子方位扫描。设置%机械仰角扫描限制机械海拔0禁用%扫描雷达。ElectronicAzimuthLimits = [0 0];雷达。MechanicalElevationLimits = [0 0];%确认海拔的视野大于高程%由扫描张成的限制elSpan = diff (radar.ElectronicElevationLimits) isLarger = radar.FieldOfView (2) > elSpan
elSpan = 10 isLarger =逻辑1
%运行仿真helperScanRadarModesExample (运行仿真的、ts、平台、雷达、5);



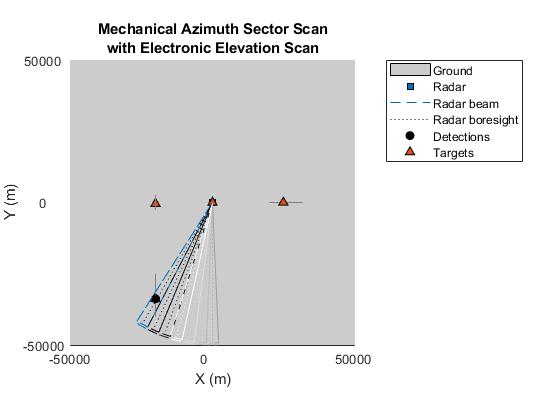
之前的数据显示,雷达检测入站的目标。注意到雷达的孔径(黑色虚线)位于水平地面的飞机,但雷达的波束偏移孔径的高程。这个雷达的波束位置的偏移孔径是通过电子转向梁高程。
电子方位扇形扫描
方位部门可以使用电子扫描调查。电子扫描方位部门通过创建一个相同fusionRadarSensor使用部门的扫描配置的扫描模式设置为‘电子’而不是‘机械’。使高度,该地区地面高程由叠加扫描光束跨越整个仰角扫描限制。
雷达= fusionRadarSensor (1,“部门”,“ScanMode”,“电子”,“HasElevation”,真的,…“MountingAngles”(-135 0 0),“MountingLocation”,(0 0 -15));%更新率设置为显示多个周期的光栅扫描模式雷达。UpdateRate = UpdateRate;%设置雷达的方位的视野5度显示更大的光束radar.FieldOfView (1) = 5;%运行仿真helperScanRadarModesExample (运行仿真的、ts、平台、雷达、6);



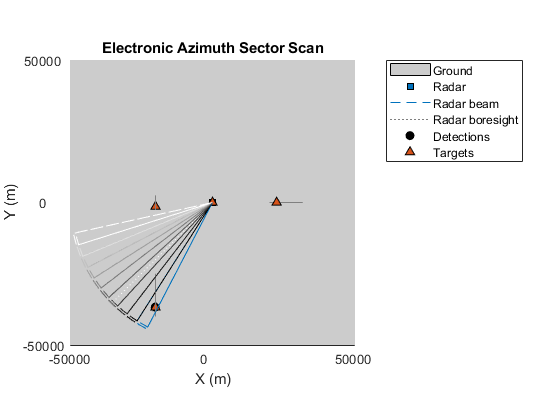
之前的数据显示,电子行业扫描总是扫描方向相同(在本例中,从左边的图的右侧图)。与机械扫描、下梁位置受到天线目前的机械位置,电子扫描可以瞬间移动扫描领域内的光束。
光栅扫描
机械光栅扫描
雷达可以很容易地配置为执行机械光栅扫描模式如下。
雷达= fusionRadarSensor (1,“光栅”,“MountingAngles”(-135 0 0),“MountingLocation”,(0 0 -15));%更新率设置为显示多个周期的光栅扫描模式雷达。UpdateRate = UpdateRate;%设置雷达的方位的视野5度显示更大的光束radar.FieldOfView (1) = 5;%运行仿真helperScanRadarModesExample (运行仿真的、ts、平台、雷达、7);


前面的数据显示雷达的波束位置以及每个3海拔光栅扫描雷达的酒吧。在每个方位扫描,雷达仰角的步骤的视野和逆转的方向方位扫描。达到海拔扫描限制时,雷达开始一个新的光栅扫描的扭转梁高程方向的步骤。
您可以使用此配置作为起点和调整机械扫描范围和视野与雷达的扫描模式你想模型。
电子光栅扫描
您还可以配置执行电子光栅扫描雷达模式。电子光栅扫描模式立即重复相同的扫描序列扫描后,但机械光栅逆转其扫描序列返回天线的机械位置回到它的起源。
配置执行电子光栅扫描雷达通过设置“电子”的扫描模式。
雷达= fusionRadarSensor (1,“光栅”,“ScanMode”,“电子”,“MountingAngles”(-135 0 0),“MountingLocation”,(0 0 -15));%更新率设置为显示多个周期的光栅扫描模式雷达。UpdateRate = UpdateRate;%设置雷达的方位的视野5度显示更大的光束radar.FieldOfView (1) = 5;%运行仿真helperScanRadarModesExample (运行仿真的、ts、平台、雷达、8);
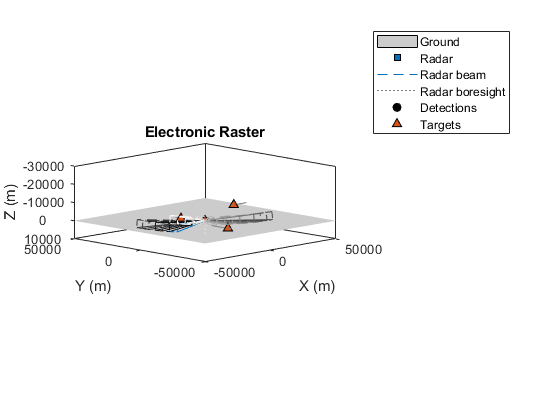

前面的数据显示雷达的波束位置以及每个3海拔光栅扫描雷达的酒吧。在每个方位扫描,雷达仰角的步骤的视野并继续扫描方位在同一方向上扫描。达到一个仰角扫描限制时,雷达重复相同的光栅扫描序列的位置。通过电子扫描,雷达可以瞬间返回到开始扫描模式,而不是受制于当前机械位置的雷达。
您可以使用此配置作为起点和调整电子扫描范围和视野与雷达的扫描模式你想模型。
总结
这个例子向您展示了如何许多常见的扫描模式使用模型fusionRadarSensor。这个模型提供了预设,使您能够快速配置雷达和额外的轻微调整扫描参数匹配的雷达建模。