开始使用激光雷达的工具箱
Lidar Toolbox™提供了用于设计、分析和测试激光雷达处理系统的算法、功能和应用程序。可以进行目标检测和跟踪、语义分割、形状拟合、激光雷达配准和障碍物检测。该工具箱提供了用于激光相机交叉校准的工作流程和应用程序。
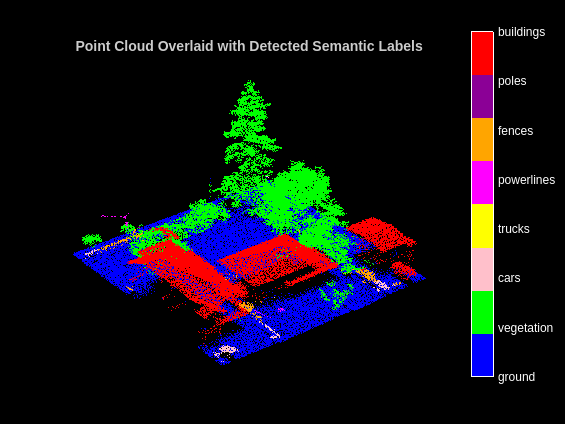
这个工具箱可以让你从Velodyne传输数据®并读取Velodyne和IBEO激光雷达传感器记录的数据。激光雷达查看器应用程序能够交互式可视化和分析激光雷达点云。您可以使用PointPillars、SqueezeSegV2和PointNet++等机器学习和深度学习算法来训练检测、语义分割和分类模型。Lidar Labeler App支持手动和金宝app半自动标记激光雷达点云,用于训练深度学习和机器学习模型。
激光雷达工具箱为感知和导航工作流程提供了激光雷达处理参考示例。大多数工具箱算法支持C/ c++代码生成,以集成金宝app现有代码、桌面原型和部署。
教程
- 读取激光雷达和摄像头数据,从Rosbag文件
这个例子展示了如何从rosbag文件中读取和保存图像和点云数据。
- 利用特征估计两点云之间的变换
这个例子展示了如何估计两个点云之间的刚性转换。
- 在点云中匹配和可视化相应的特征
这个例子展示了如何使用
pcmatchfeatures函数并使用pcshowMatchedFeatures函数。 - 开始使用激光雷达标签
交互式标记点云或点云序列。
关于激光雷达处理
- 激光雷达处理概述
激光雷达应用的高层概述。
- 什么是激光雷达相机校准?
集成激光雷达和相机数据。
- 在MATLAB中实现点云SLAM
理解点云配准和映射工作流程。
- 激光雷达工具箱中的坐标系统
激光雷达工具箱中的坐标系统概述。
特色的例子





视频

什么是激光雷达工具箱?
激光雷达工具箱简介。

基于MATLAB的激光雷达摄像机标定
介绍激光雷达摄像机校准功能,这是将激光雷达和摄像机的数据结合到系统中的一个重要步骤。

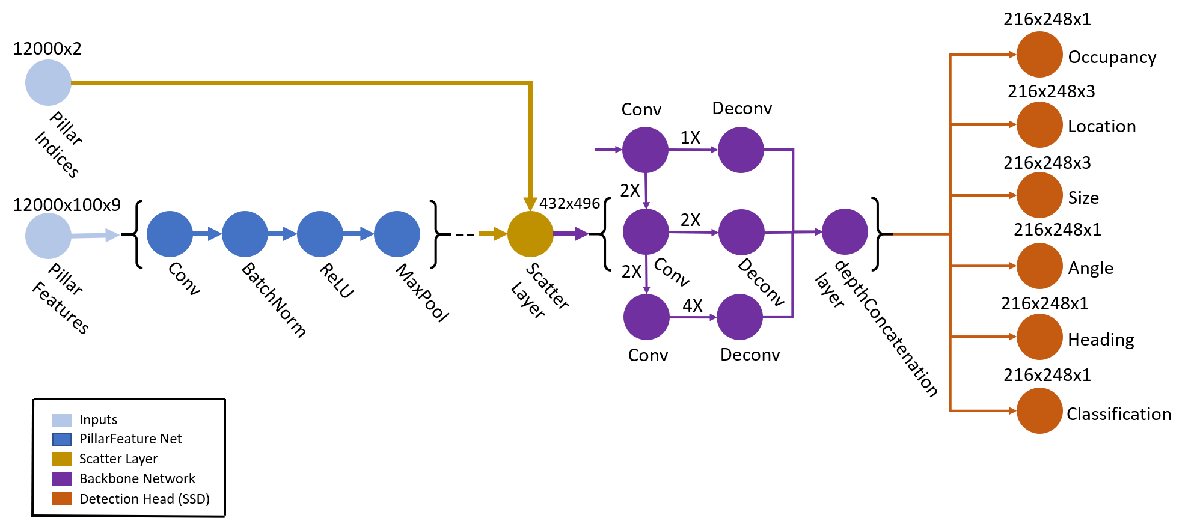
基于深度学习的激光雷达点云目标检测
学习如何使用PointPillars深度学习网络在激光雷达点云上进行三维目标检测。

利用MATLAB建立二维激光雷达碰撞预警系统
建立一个系统,可以发出碰撞警告基于二维激光雷达扫描在一个模拟仓库竞技场。
你也可以从以下列表中选择一个网站: