硬件连接
Motor Control Blockset™支金宝app持以下硬件配置:
F28069控制卡配置
LAUNCHXL-F28069M配置
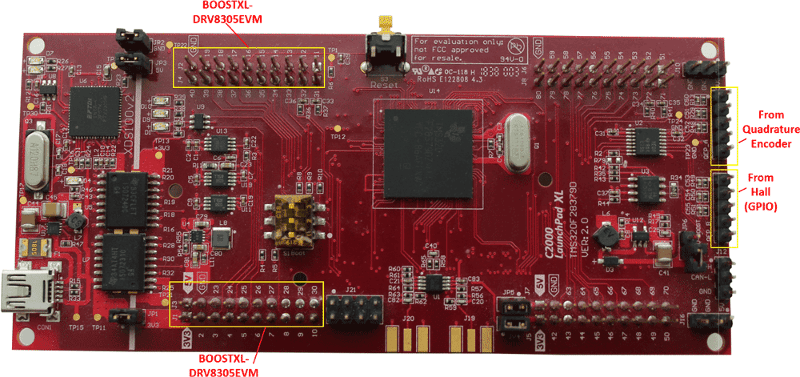
LAUNCHXL-F28379D配置
C2000 MCU Resolver Eval Kit [R2]
F28069控制卡配置
该配置包括以下硬件组成:
德州仪器DRV8312-69M-KIT逆变器板
德州仪器F28069单片机控制卡
电机BLY171D(支持霍尔和金宝app正交编码器传感器)
电机BLY172S(支持霍尔传金宝app感器)
正交编码器
直流电源
请注意
由于辅助电源相关硬件问题,DRV8312-69M-KIT不支持连接到某些电机(如Teknic M-2310P电机)的位置传感器。金宝app
配置F28069控制卡的硬件连接步骤如下:
将F28069控制卡连接到DRV8312-69M-KIT逆变板的J1上。
将电机三相连接到逆变板上的MOA、MOB和MOC。
将直流电源(24V)连接到逆变器板上的PVDDIN。
警告
当PVDD和GND与直流电源的正负连接时要小心。反向连接会损坏硬件部件。

下面的步骤描述了如何接口正交编码器传感器:
将正交编码器引脚(G, I, A, 5V, B)连接到逆变器板上的J4。
要使用霍尔传感器实现位置传感,请使用内置霍尔传感器的电机(例如BLY171D和BLY172S)。下面的步骤描述了霍尔传感器接口的步骤:
将霍尔传感器编码器输出连接到逆变板上的J10。

当使用电机控制模块时,我们建议对DRV8312-69M-KIT逆变器板进行以下跳线设置。您可以根据应用程序需求自定义这些设置。有关这些设置的更多信息,请参阅德州仪器网站上的设备用户指南。
JP1——VR1
JP2——在
JP3——从
JP4——从
JP5——从
M1 - H
J2 -关闭
J3 -关闭
办公室——单片机
RSTB——单片机
RSTC——单片机
LAUNCHXL-F28069M和LAUNCHXL-F28379D配置
LAUNCHXL-F28069M配置包括以下硬件组件:
LAUNCHXL-F28069M控制器
支持BOOSTXL-DRV8305金宝app(逆变器)
Teknic电机M-2310P(支持霍尔和正金宝app交编码器传感器)
电机BLY171D(支持霍尔和金宝app正交编码器传感器)
电机BLY172S(支持霍尔传金宝app感器)
直流电源
LAUNCHXL-F28379D配置包括以下硬件组件:
LAUNCHXL-F28379D控制器
BOOSTXL-DRV8305和BOOSTXL-3PHGANINV(支持的逆变金宝app器)
Teknic电机M-2310P(支持霍尔和正金宝app交编码器传感器)
电机BLY171D(支持霍尔和金宝app正交编码器传感器)
电机BLY172S(支持霍尔传金宝app感器)
直流电源
LAUNCHXL-F28069M和LAUNCHXL-F28379D配置的硬件连接如下:
将BOOSTXL逆变器板连接到LAUNCHXL控制器板上的J1、J2、J3、J4。
请注意
将逆变器板连接到控制板上,使BOOSTXL的J1、J2与LAUNCHXL的J1、J2对齐。
将电机三相连接到BOOSTXL逆变板上的MOTA、MOTB、MOTC。
将直流电源(24V)连接到BOOSTXL逆变器板的PVDD和GND。
警告
当PVDD和GND与直流电源的正负连接时要小心。反向连接会损坏硬件部件。

下面的步骤描述了如何接口正交编码器传感器:
将正交编码器引脚(G, I, A, 5V, B)连接到LAUNCHXL控制器板上的QEP_A。
要使用霍尔传感器实现位置传感,需要使用内置霍尔传感器的电机(例如,Teknic电机M-2310P、BLY171D和BLY172S)。下面的步骤描述了霍尔传感器接口的步骤:
将霍尔传感器编码器输出连接到LAUNCHXL控制器板上配置为eCAP的GPIO端口。

当使用电机控制模块时,我们推荐LAUNCHXL变频器板的以下跳线设置。您可以根据应用程序需求自定义这些设置。有关这些设置的更多信息,请参阅德州仪器网站上的设备用户指南。
LAUNCHXL-F28069M控制器
JP1——在
JP2——在
JP3——在
JP4——在
JP5——在
JP6——从
JP7——在
LAUNCHXL-F28379D控制器
JP1——在
JP2——在
JP3——在
JP4——在
JP5——在
JP6——从
Dyno(双电机)设置说明
将Motor1、Motor2三相连接到相应的BOOSTXL逆变板上的MOTA、MOTB、MOTC。
将BOOSTXL逆变器板(连接到Motor1)连接到LAUNCHXL控制器板上的J1、J2、J3、J4。
请注意
将逆变器板连接到控制板上,使BOOSTXL的J1、J2与LAUNCHXL的J1、J2对齐。
将BOOSTXL逆变器板(连接到Motor2)连接到LAUNCHXL控制器板上的J5、J6、J7、J8。
请注意
将逆变器板贴在控制板上,使BOOSTXL的J1、J2与LAUNCHXL的J5、J6对齐。
将直流电源(24V)连接到两块BOOSTXL逆变器板的PVDD和GND。
请注意
将BOOSTXL板上的PVDD和GND(用于MOTOR1和MOTOR2)连接到同一个电源。当一个电机消耗功率时,第二个电机产生功率。如果你把两个电机连接到同一个电源,一个电机产生的功率被另一个电机消耗。直流电源只对损耗供电。
将Motor1 (G, I, A, 5V, B)的正交编码器引脚连接到LAUNCHXL控制器板上的QEP_A。
将Motor2 (G, I, A, 5V, B)的正交编码器引脚连接到LAUNCHXL控制器板上的QEP_B。
警告
当PVDD和GND与直流电源的正负连接时要小心。反向连接会损坏硬件部件。


TMDSRSLVR C2000 Resolver to Digital Conversion Kit
TMDSRSLVR C2000 Resolver to Digital Conversion Kit配置包括以下硬件组件:
LAUNCHXL-F28069M控制器
支持BOOSTXL-DRV8305金宝app(逆变器)
直流电源
TMDSRSLVR C2000 Resolver to Digital Conversion Kit (Resolver Eval Kit [R2])
解析器编码器
TMDSRSLVR单板的硬件连接如下:
将直流电源(15V)连接到TMDSRSLVR板上的J2。
将解析器的正弦波输出引脚连接到TMDSRSLVR板上J10的引脚1,2。
将余弦波解析器输出引脚连接到TMDSRSLVR板上J10的引脚3,4。
将解析器输入引脚连接到TMDSRSLVR板上J10的PWM_dither和PWM_SINE引脚。
LAUNCHXL-F28069M控制器板的硬件连接方法如下:
LAUNCHXL-F28069M控制器板通过USB接口连接到计算机。
以下步骤描述了MCU Resolver Eval Kit [R2]与LAUNCHXL-F28069M控制器板之间的硬件连接:
将TMDSRSLVR板上的COS(T2)引脚连接到LAUNCHXL-F28069M控制器板上J3的24引脚。
将TMDSRSLVR板上的SIN(T8)引脚连接到LAUNCHXL-F28069M控制器板上J3的引脚29。
将TMDSRSLVR板上的GPIO2引脚连接到LAUNCHXL-F28069M控制器板上J4的38引脚。

你也可以从以下列表中选择一个网站:
