主要内容
六步变换
生成无刷直流电机六步换向的开关序列
- 库:
电机控制模块/控制/控制参考
描述
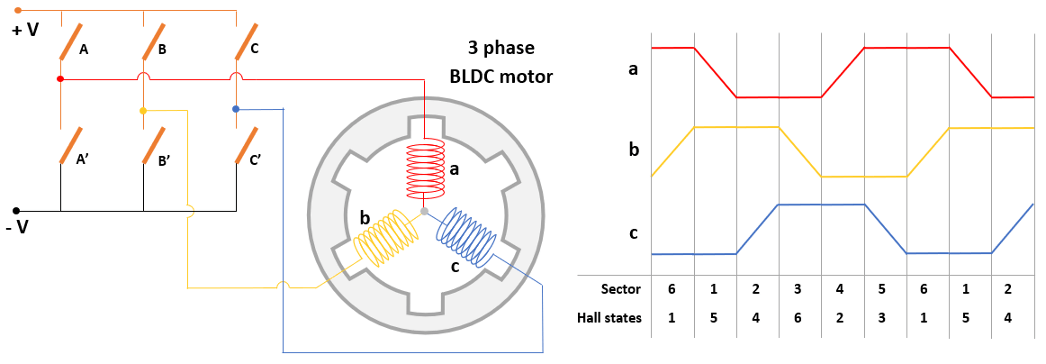
的六步变换块采用120度传导模式产生开关序列,在三相无刷直流电机上实现六步换向(或梯形换向)。你可以使用开关信号来操作开关和控制定子电流,从而控制电机的速度和旋转方向。
该块接受霍尔序列号或转子位置(从位置传感器,如霍尔或正交编码器传感器)和扭矩方向作为输入。它使用霍尔序列或位置输入来确定转子所在的扇区。该块计算开关顺序,使其激励相应的相位,以保持转矩角(转子d轴与定子磁场之间的角)为90度(偏差为30度)。
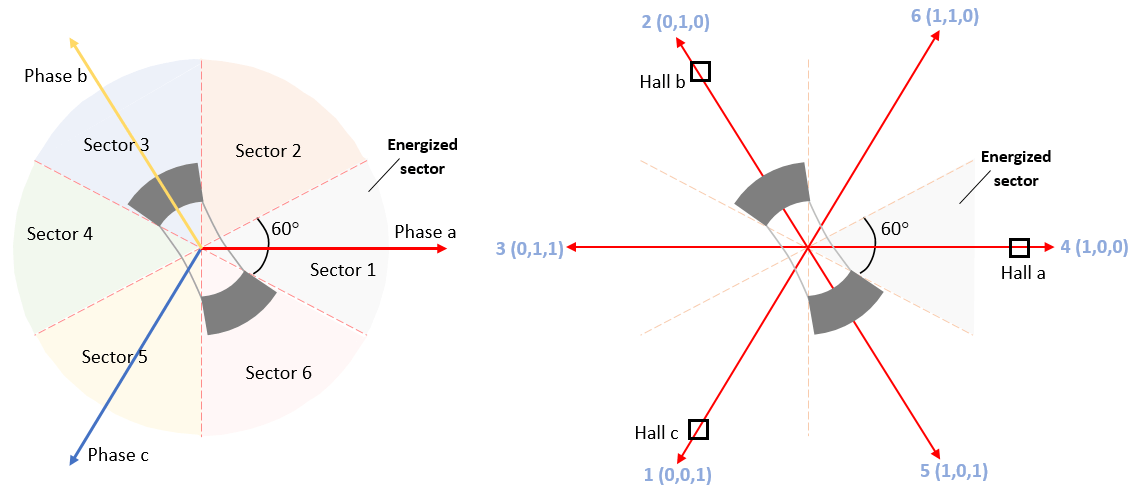
这个图是一个例子,显示了定子磁场相量及其默认霍尔序列。

该模块使用基于霍尔序列的换相逻辑来产生开关序列。
| 州厅(a厅、b厅、c厅) | 切换顺序(AA' BB' CC') | ||
|---|---|---|---|
| AA’ | BB” | CC ' | |
| 5 (101) | 00 | 10 | 01 |
| 4 (100) | 01 | 10 | 00 |
| 6 (110) | 01 | 00 | 10 |
| 2 (010) | 00 | 01 | 10 |
| 3 (011) | 10 | 01 | 00 |
| 1 (001) | 10 | 00 | 01 |
这个图显示了定子磁场相量以及可能的扇区(由输入转子位置确定)。

该块使用基于位置传感器信号的换向逻辑来产生开关序列。
| 位置(θ) | 部门 | 切换顺序(AA' BB' CC') | ||
|---|---|---|---|---|
| AA’ | BB” | CC ' | ||
| (-30°30°) | 1 | 00 | 10 | 01 |
| (30°、90°) | 2 | 01 | 10 | 00 |
| (90°、150°] | 3. | 01 | 00 | 10 |
| (150°、210°] | 4 | 00 | 01 | 10 |
| (210°、270°] | 5 | 10 | 01 | 00 |
| (270°、330°] | 6 | 10 | 00 | 01 |
港口
输入
输出
参数
模型的例子
扩展功能
介绍了R2020b
你也可以从以下列表中选择一个网站:
