空时自适应处理简介
本例简要介绍了空时自适应处理(STAP)技术,并说明了如何使用相控阵系统工具箱™ 对接收到的脉冲应用STAP算法。STAP是机载雷达系统中用于抑制杂波和干扰的技术。
介绍
在地面移动目标指示器(GMTI)系统中,机载雷达收集地面移动目标的回波。然而,接收到的信号不仅包含来自目标的反射回波,还包括来自被照亮的地面的返回信号。从地面返回的信号一般称为杂乱.
回波来自所有被雷达波束照亮的区域,因此它占据了所有的范围和所有的方向。杂波总回波往往比回波信号强得多,这给目标检测带来了很大的挑战。杂波滤波是GMTI系统的重要组成部分。
在传统的MTI系统中,杂波滤波经常利用地面不移动的事实。因此,杂波占据了多普勒频谱中的零多普勒仓。这一原理导致了许多基于多普勒的杂波滤波技术,如脉冲抵消。有兴趣的读者可以参考利用动目标指示(MTI)雷达抑制地杂波(雷达工具箱)以脉冲消除器为详细示例。当雷达平台本身也在移动时,例如在平面内,地面回波的多普勒分量不再为零。此外,杂波回波的多普勒分量与角度有关。在这种情况下,杂波回波可能在多普勒频谱上具有能量。因此e、 杂波不能仅根据多普勒频率进行滤波。
干扰是接收信号中经常出现的另一个重要干扰源。最简单的干扰形式是拦阻式干扰机,它是指向雷达接收机的强连续白噪声,因此接收机无法轻易检测到目标回波。干扰机通常位于特定位置,干扰信号因此,al与特定方向相关。但是,由于干扰机的白噪声特性,接收到的干扰信号占据了整个多普勒频带。
STAP技术在角域和多普勒域(因此被称为“空时自适应处理”)滤波信号以抑制杂波和干扰回波。在下面的部分中,我们将模拟从目标、杂波和干扰机返回的信号,并说明STAP技术如何从接收信号中过滤干扰。
系统设置
我们首先定义一个雷达系统,从示例中构建的系统开始雷达接收机的模拟测试信号.
负载基本经济雷达采样数据表;%负载单站脉冲雷达
天线的定义
假设天线单元在前半球具有各向同性响应,在后半球具有全零响应。工作频率范围设置为8至12 GHz,以匹配系统的10 GHz工作频率。
天线=分阶段。IsotropicAntennaElement...(“FrequencyRange”,[8e9 12e9],“背靠背”,真正的);%折流各向同性
定义具有自定义元素图案的6元素ULA。元素间距假定为波形波长的一半。
fc=散热器。工作频率;c=散热器。传播速度;λ=c/fc;ula=相控。ula(“元素”天线“NumElements”6...“ElementSpacing”λ/ 2);模式(fc,齿龈“传播速度”C“类型”,“powerdb”)头衔(“6元件挡板式ULA响应模式”)视图(60,50)

雷达装置
接下来,将天线阵列安装在散热器/收集器上。然后,定义雷达运动。雷达系统安装在离地面1000米的飞机上。飞机以一定的速度沿ULA的阵列轴飞行,使其在一个脉冲间隔内以阵列的半个元素间隔飞行。(下面的DPCA技术部分提供了对这种设置的说明。)
散热器.Sensor=ula;收集器.Sensor=ula;sensormotion=phased.Platform(“初始位置”,[0;0;1000]);arrayAxis=[0;1;0];prf=waveform.prf;vr=ula.element间距*prf;%单位:米/秒sensormotion。速度= vr / 2 * arrayAxis;
目标
接下来,定义一个雷达横截面为1平方米的非起伏目标在地面上移动。
目标=相位。雷达目标(“模型”,“非幸运”,“MeanRCS”1....“OperatingFrequency”,fc);tgtmotion=分阶段平台(“初始位置”,[1000; 1000; 0],...“速度”, (30;30;0]);
干扰机
目标返回所需的信号;然而,在接收到的信号中也存在一些干扰。如果雷达工具箱可用,请设置变量hasRadarToolbox若为true,则定义有效辐射功率为100瓦的简单拦阻干扰机。否则,模拟将使用保存的干扰机信号。
hasRadarToolbox = false;Fs = waveform.SampleRate;rngbin = c / 2 * (0:1 / Fs: 1 / prf-1 / Fs)。”;如果hasRadarToolbox干扰机=拦阻干扰机(“ERP”,100);jammer.sampleperframe=numel(rngbin);jammermotion=phased.Platform(“初始位置”,[1000; 1732; 1000]);终止
杂乱
在这个例子中,我们使用常数gamma模型模拟杂波,gamma值为-15 dB。文献表明,这个伽马值可以用来模拟被森林覆盖的地形。对于每个范围,杂波的返回可以被认为是该范围环上许多小杂波补丁的返回的组合。由于天线是后挡板,杂波的贡献只来自前面。为了简化计算,每个patch使用10度的方位角宽度。同样,如果雷达工具箱不可用,模拟将使用保存的杂波信号。
如果hasRadarToolbox Rmax=5000;Azcov=120;杂波=ConstantGamma杂波(“传感器”,乌拉,“采样器”,财政司司长,...“伽马”, -15,“PlatformHeight”,1000,...“OperatingFrequency”足球俱乐部,...“传播速度”C...“PRF”,prf,...“传送器”,发射机峰值功率*db2pow(发射机增益),...“平台速度”、规范(sensormotion.Velocity),...“平台方向”,[90;0],...“ClutterMaxRange”,Rmax,...“杂波方位角扫描”Azcov,...“Patchazimutspan”10...“输出格式”,“脉搏”);终止
传播路径
最后,创建一个自由空间环境来表示目标和干扰机路径。因为我们使用的是单基地雷达系统,所以目标信道被设置为模拟双向传播延迟。干扰器路径仅计算单向传播延迟。
tgtchannel=phased.FreeSpace(“TwoWayPropagation”,真的,“采样器”,财政司司长,...“OperatingFrequency”,fc);jammerchannel=phased.FreeSpace(“TwoWayPropagation”错误的...“采样器”,财政司司长,“OperatingFrequency”,fc);
模拟回路
现在我们已经准备好模拟返回。处理前收集10个脉冲。将干扰机模型中的随机数生成器的种子设置为一个常数,以获得可重复的结果。
numpulse = 10;%脉冲数tsig=零(大小(rngbin,1),ula.NumElements,numpulse);jsig=tsig;tjcsig=tsig;tcsig=tsig;csig=tsig;如果hasRadarToolbox干扰机。SeedSource =“财产”;干扰机。种子= 5;杂乱。SeedSource =“财产”;杂乱。种子= 5;其他的负载STAPIntroExampleData;终止对于m = 1: numpulse%更新传感器、目标并计算传感器看到的目标角度[sensorpos, sensorvel] = sensormotion(1 /脉冲重复频率);[tgtpos, tgtvel] = tgtmotion(1 /脉冲重复频率);[~, tgtang] = rangeangle (tgtpos sensorpos);%更新干扰机并计算传感器看到的干扰机角度如果hasRadarToolbox[jampos,jamvel]=干扰运动(1/prf);[~,jamang]=范围角(jampos,sensorpos);终止%模拟脉冲在目标方向上的传播脉冲=波形();[脉搏,txstatus] =发射机(脉冲);脉冲=散热器(脉搏、tgtang);脉冲= tgtchannel(脉搏、sensorpos、tgtpos、sensorvel tgtvel);在传感器处收集目标收益脉冲=目标(脉冲);tsig(:,:,m)=采集器(脉冲,tgtang);%在传感器处收集干扰和杂波信号如果hasRadarToolbox jamsig=jammer();jamsig=jammerchannel(jamsig,jampos,sensorpos,jamvel,sensorvel);jsig(:,:,m)=采集器(jamsig,jamang);csig(:,:,m)=杂波();终止接收采集信号tjcsig(:,:,m)=接收机(tsig(:,:,m)+jsig(:,:,m)+csig(:,:,m),...~(txstatus>0));目标+干扰器+杂波tcsig(:,:,m)=接收机(tsig(:,:,m)+csig(:,:,m),...~(txstatus>0));%目标+杂波tsig(:,:,米)=接收机(tsig(:,:,米),...~(txstatus>0));%仅目标回波终止
真实目标距离、角度和多普勒
目标方位角为45度,仰角约为-35.27度。
tgtLocation = global2localcoord (tgtpos,“rs”,sensorpos);tgtAzAngle=tgtLocation(1)
tgtAzAngle = 44.9981
tgtElAngle=tgtLocation(2)
tgtElAngle=-35.2651
目标距离是1732米。
tgtRng=tgt位置(3)
tgtRng = 1.7320 e + 03
目标多普勒归一化频率约为0.21。
sp=径向速度(tgtpos,TGT运动速度,...传感器位置、传感器运动、速度);tgtDp=2*speed2dop(sp,λ);%往返多普勒tgtDp/prf
ans = 0.2116
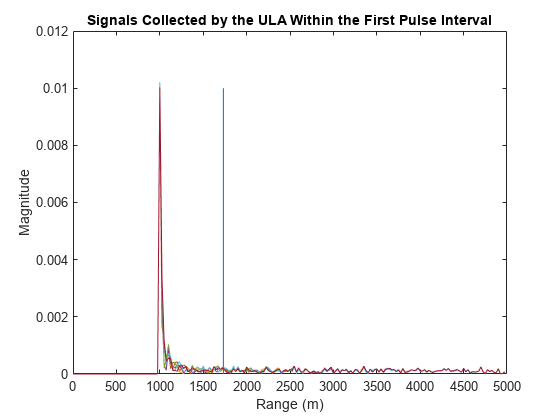
接收到的总信号包括目标、杂波和干扰机的综合回波。信号是一个三维的数据立方体(范围箱x元素数量x脉冲数量)。请注意,杂波返回在总返回中占主导地位,并掩盖了目标返回。如果不进行进一步处理,我们无法检测到目标(蓝色垂线)。
ReceivePulse = tjcsig;情节([tgtRng tgtRng], [0 0.01], rngbin, abs (ReceivePulse (:,: 1)));包含(‘射程(米)’),伊拉贝尔(“震级”);标题(“ULA在第一个脉冲间隔内收集的信号”)
现在,检查二维角度多普勒(或时空)域中的返回。一般来说,响应是通过扫描给定仰角的所有距离和方位角生成的。因为我们确切地知道目标在哪里,我们可以计算其相对于天线阵列的距离和仰角。
tgtCellIdx = val2ind (tgtRng c / (2 * Fs));快照= shiftdim (ReceivePulse (tgtCellIdx,:,:));%删除单件dimangdopresp =分阶段。AngleDopplerResponse (“传感器阵列”,乌拉,...“OperatingFrequency”足球俱乐部,“传播速度”C...“PRF”,prf,“升降角”,tgtElAngle);plotResponse(angdopresp、快照、,“正常化供应商”,真正的);文本(tgtAzAngle tgtDp /脉冲重复频率,“+目标”)
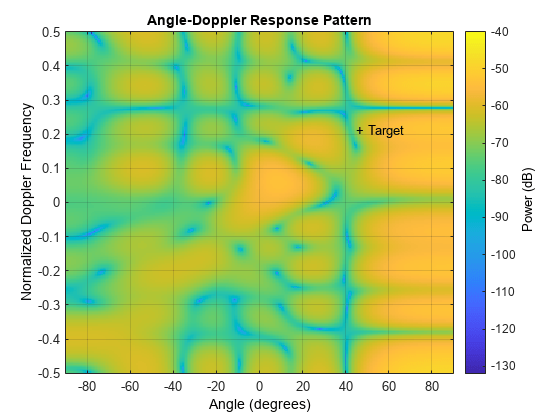
如果我们观察由杂波回波控制的角度多普勒响应,我们会发现杂波回波不仅占据零多普勒,还占据其他多普勒位置。杂波回波的多普勒也是角度的函数。杂波回波在整个角度多普勒空间中看起来像一条对角线。这条线通常是r误认为杂波脊.接收到的干扰信号是白噪声,以特定角度(约60度)在整个多普勒频谱上传播。
用DPCA消除器抑制杂波
位移相位中心天线(DPCA)算法通常被认为是第一种STAP算法。该算法利用移动孔径补偿平台运动,使杂波回波在不同脉冲之间不发生变化。因此,该算法可以通过简单地减去两个连续脉冲来消除杂波。
DPCA消去器常用于超宽带系统,但需要特殊的平台运动条件。平台必须沿着天线的阵列轴以这样的速度移动,在一个脉冲间隔内,平台的移动正好是元件间距的一半。这里使用的系统是按照前面几节的描述设置的,以满足这些条件。
假设N是ULA单元的数量。在第一个脉冲期间,天线1通过天线N-1接收到的杂波回波与在第二个脉冲期间,天线2通过天线N接收到的杂波回波相同。通过减去两个脉冲间隔期间在这两个子阵列接收到的脉冲,杂波可以被消除t、 这种方法的成本是孔径比原始阵列小一个元素。
现在,定义一个DPCA取消器。算法可能需要搜索所有角度和多普勒组合来定位目标,但在这个例子中,因为我们知道目标的确切位置,我们可以将处理器指向那个点。
rxmainlobedir=[0;0];statdppca=phased.DPCACanceller(“传感器阵列”,乌拉,“PRF”,prf,...“传播速度”C“OperatingFrequency”足球俱乐部,...“方向”,rxmainlobedir,“多普勒”,tgtDp,...“重量输出”,真正的)
stapdpca =分阶段。DPCACanceller with properties: SensorArray: [1x1 phase .]传播速度:299792458工作频率:1.0000e+10 PRF source: 'Property' PRF: 2.9979e+04 DirectionSource: 'Property' Direction: [2x1 double] NumPhaseShifterBits: 0 DopplerSource: 'Property' Doppler: 6.3429e+03 WeightsOutputPort: true PreDopplerOutput: false
首先,将DPCA消除器应用于目标回波和杂波回波。
ReceivePulse = tcsig;[y, w] = stapdpca (ReceivePulse tgtCellIdx);
处理后的数据将空间和脉冲中的所有信息合并为单个脉冲。接下来,在时域中检查处理后的信号。
情节([tgtRng tgtRng], [0 1.2 e-5], rngbin, abs (y));包含(‘射程(米)’),伊拉贝尔(“震级”);标题('DPCA消除器输出(无干扰器)')
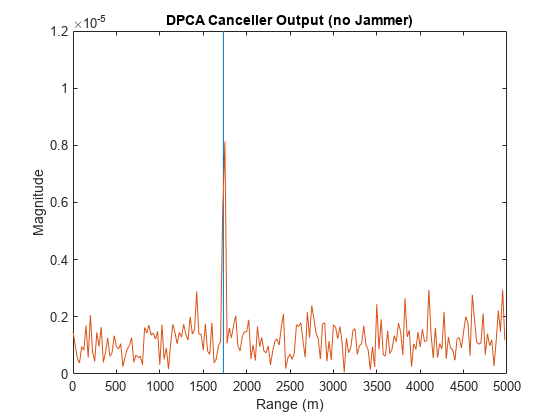
现在,信号与噪声清晰区分,杂波已被滤除。从下面DPCA处理器权重的角度多普勒响应中,我们还可以看到权重沿杂波脊产生一个深空。
angdopresp。ElevationAngle = 0;绘图仪响应(昂多普雷斯,w,“正常化供应商”,对);头衔(“0度仰角时DPCA加权角度多普勒响应”)
虽然DPCA获得了非常好的结果,但雷达平台在使用该技术时必须满足非常严格的运动要求。此外,DPCA技术无法抑制干扰机干扰。
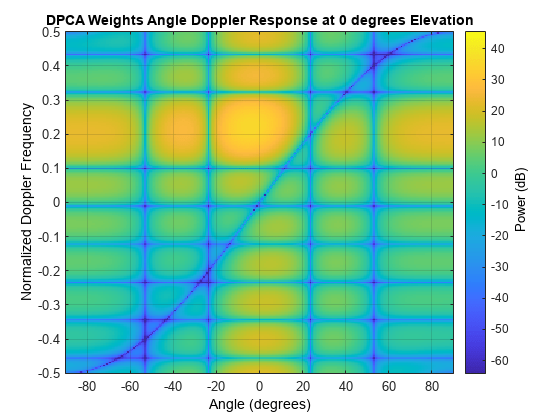
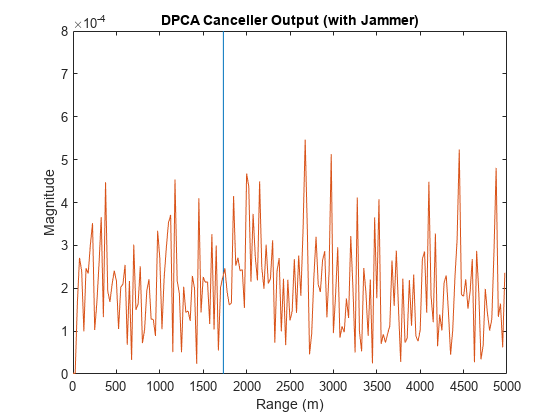
将DPCA处理应用于总信号会产生下图所示的结果。我们可以看到,DPCA无法从信号中过滤干扰机。由此产生的权重角度多普勒模式与之前相同。因此,处理器无法适应新添加的干扰机干扰。
接收脉冲=tjcsig;[y,w]=stapdpca(接收脉冲,tgtCellIdx);绘图([tgtRng tgtRng],[0 8e-4],rngbin,abs(y));xlabel(‘射程(米)’),伊拉贝尔(“震级”);标题('DPCA消除器输出(带干扰器)')
绘图仪响应(昂多普雷斯,w,“正常化供应商”,对);头衔(“0度仰角时DPCA加权角度多普勒响应”)
SMI波束形成器的杂波和干扰抑制
为了同时抑制杂波和干扰,我们需要一种更复杂的算法。当干扰为高斯分布时,最佳接收机权重由[1]给出
在哪里K是一个标量因子,R是干扰信号的时空协方差矩阵,并且s是所需的时空转向矢量。确切的信息R通常不可用,因此我们将使用样本矩阵求逆(SMI)算法R从训练细胞样本中提取,然后用在前面提到的等式中。
现在,定义SMI波束形成器并将其应用于信号。除了DPCA中需要的信息外,SMI波束形成器还需要知道保护单元的数量和训练单元的数量。该算法使用训练单元中的样本来估计干扰。因此,我们不应该使用接近目标单元格的单元格进行估计,因为它们可能包含一些目标信息,即我们应该定义保护单元格。保护单元的数量必须为偶数,以便在目标单元前后平均分割。训练单元的数量也必须是偶数,并且在目标前后平均分配。通常,训练单元的数量越大,干扰估计就越好。
tgtAngle = [tgtAzAngle;tgtElAngle];stapsmi =分阶段。STAPSMIBeamformer (“传感器阵列”,乌拉,“PRF”,prf,...“传播速度”C“OperatingFrequency”,fc,...“方向”tgtAngle,“多普勒”,tgtDp,...“重量输出”,真的,...“NumGuardCells”4.“NumTrainingCells”, 100)
stapsmi=phased.STAPSMIBEAMENTER,具有以下属性:传感器阵列:[1x1 phased.ULA]传播速度:299792458工作频率:1.0000e+10 PRFSource:'Property'PRF:2.9979e+04 DirectionSource:'Property'方向:[2x1 double]NumPasseShift位:0 DopplerSource:“属性”多普勒:6.3429e+03 NumGuardCells:4 NumTrainingCells:100权重输出:true
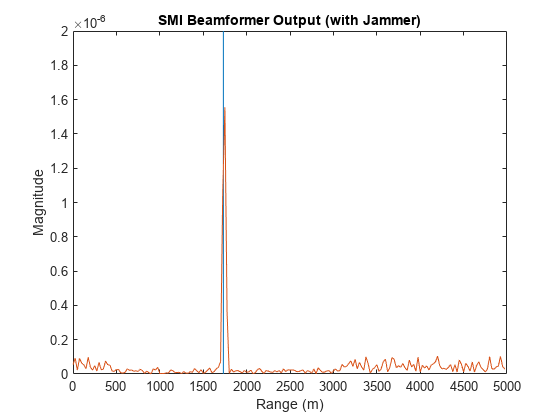
[y,w]=statsmi(接收脉冲,tgtCellIdx);绘图([tgtRng tgtRng],[0 2e-6],rngbin,abs(y));xlabel(‘射程(米)’),伊拉贝尔(“震级”);标题('SMI波束形成器输出(带干扰机)')
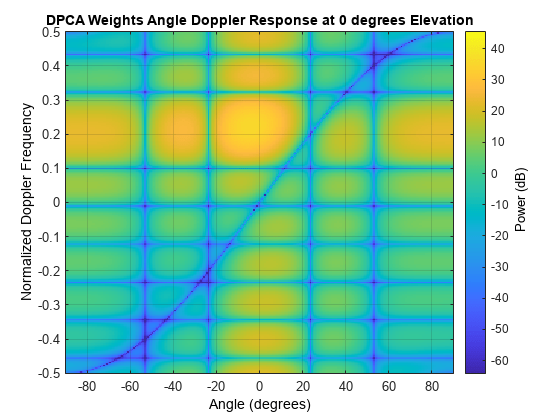
绘图仪响应(昂多普雷斯,w,“正常化供应商”,对);头衔(“SMI权重角度多普勒响应在0度仰角”)
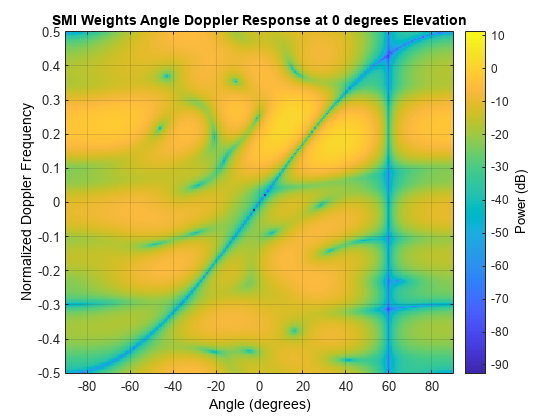
结果表明,SMI波束形成器既能区分杂波信号,又能区分干扰信号。SMI权值的角度多普勒图沿干扰机方向显示深零。
SMI提供了最大的自由度,因此,在所有STAP算法中最大的增益。它常被用作比较不同STAP算法的基线。
使用ADPCA消除器降低计算成本
虽然SMI是最佳的STAP算法,但它有几个固有的缺点,包括计算成本高,因为它使用每个单元的全维数据。更重要的是,SMI需要跨越多个脉冲的稳定环境。这种环境在实际应用中并不常见。因此,许多降维STAP alg算法已经被提出。
一种自适应DPCA(ADPCA)消除器以与DPCA相同的方式滤除杂波,但它也具有抑制干扰机的能力,因为它使用两个连续的脉冲估计干扰协方差矩阵。由于只涉及两个脉冲,计算量大大减少。此外,由于算法适应干扰,它可以机器人也能忍受一些运动干扰。
现在,定义一个ADPCA消除器,然后将其应用于接收信号。
stapadpca=phased.adpccanceller(“传感器阵列”,乌拉,“PRF”,prf,...“传播速度”C“OperatingFrequency”,fc,...“方向”,rxmainlobedir,“多普勒”,tgtDp,...“重量输出”,真的,...“NumGuardCells”4.“NumTrainingCells”, 100)
stapadpca =分阶段。ADPCACanceller with properties: SensorArray: [1x1 phase .]ULA]传播速度:299792458工作频率:1.0000e+10 PRFSource: 'Property' PRF: 2.9979e+04 DirectionSource: 'Property' Direction: [2x1 double] NumPhaseShifterBits: 0 DopplerSource: 'Property' Doppler: 6.3429e+03 NumGuardCells: 4 NumTrainingCells: 100 WeightsOutputPort: true PreDopplerOutput: false
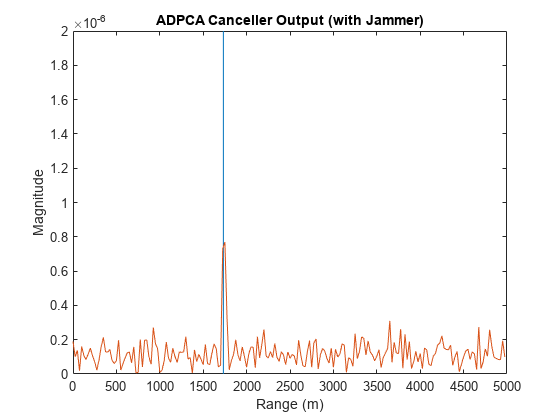
[y,w]=stapadpca(接收脉冲,tgtCellIdx);绘图([tgtRng tgtRng],[0 2e-6],rngbin,abs(y));xlabel(‘射程(米)’),伊拉贝尔(“震级”);标题('ADPCA消除器输出(带干扰器)')
绘图仪响应(昂多普雷斯,w,“正常化供应商”,对);头衔(“ADPCA加权0度仰角时的角度多普勒响应”)
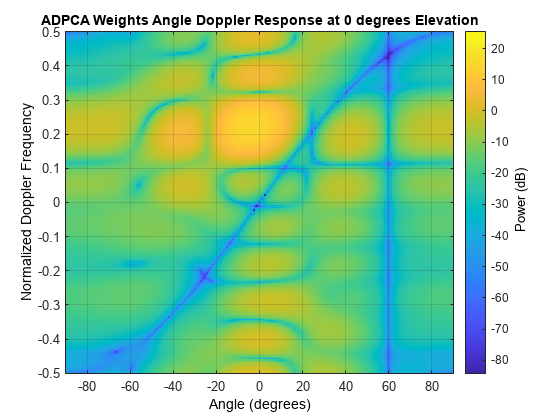
时域图显示信号成功恢复。ADPCA权重的角度多普勒响应与SMI权重产生的角度多普勒响应相似。
总结
本实例简要介绍了空时自适应处理,并说明了如何使用不同的STAP算法,即SMI、DPCA和ADPCA来抑制接收脉冲中的杂波和干扰。
参考
[1] J.R.Guerci,雷达空时自适应处理,Artech House,2003年
您还可以从以下列表中选择网站: