主要内容
感应电机磁场定向控制
每单位离散时间感应电机FOC
- 库:
模拟人生观/电气/控制/感应电机控制

描述
的感应电机磁场定向控制器块采用单元系统实现了感应电机面向磁场的控制(FOC)结构。为了解耦转矩和磁通,FOC使用了转子d-问参考框架。该图显示了控制结构。
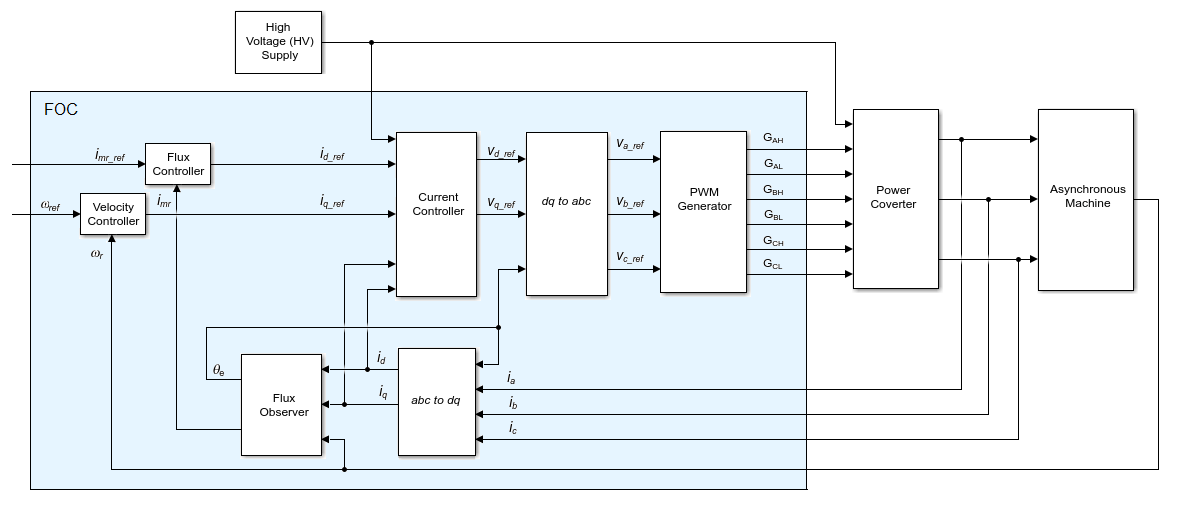
图中:
ωr为测量的角速度。
ω裁判为参考角速度。
我d和我问是吗d-及问-轴定子电流。
我一个,我b和我c是吗一个-,b-及c-相定子绕组电流。
我mr_ref是参考磁化电流。
我先生是磁化电流。
vd和v问是吗d-及问-轴定子电压。
v一个,vb和vc是吗一个-,b-及c-相定子绕组电压。
θe为转子电角度。
G啊,G艾尔,G黑洞,G提单,GCH和GCL是吗一个-,b-及c-相位高(H)和低(L)门脉冲。
假设和限制
机器参数是已知的。
实现使用单位系统。
控制结构的实现使用单一的采样率。
港口
输入
输出
参数
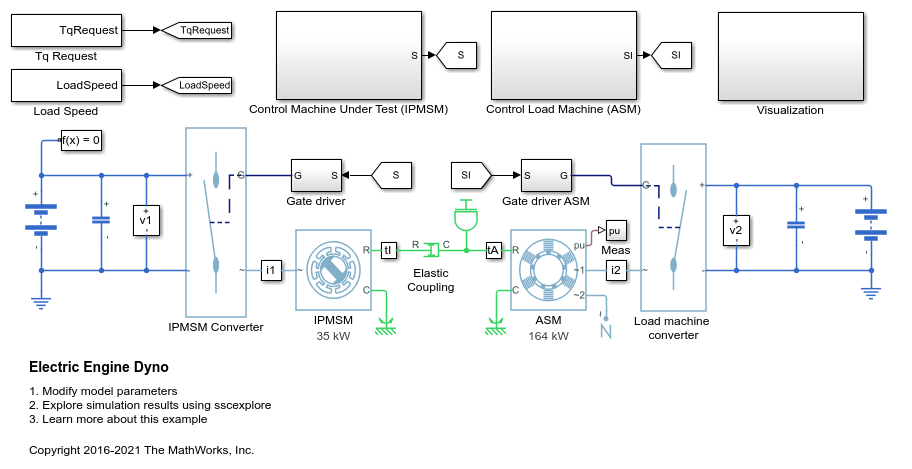
模型的例子
扩展功能
介绍了R2017b
您还可以从以下列表中选择网站: