使用极值寻求控制的防抱死制动
这个例子展示了如何使用极值寻求控制(ESC)优化制动力矩的防抱死制动系统(ABS)。
防抱死制动系统
防抱死制动系统通过调整每个车轮的制动力矩来防止车辆的刹车锁住。对于这样一个系统,下面的函数定义了车轮的滑移系数。
在这里, 车轮的角速度是和吗 为非制动状态下的车轮角速度(车速除以车轮半径)。由该方程可知,当车轮转速和车速相等时,滑移为零,当车轮被锁住时,滑移为1 ( 是零)。制动时理想的滑移值为0.2,即在车速相同的情况下,车轮转数等于非制动转数的0.8倍。这个滑移值最大限度地提高了轮胎和路面之间的附着力,并使可用摩擦力的停车距离最小。
摩擦系数 轮胎和路面之间是一个滑动的函数,称为滑动mu-slip曲线.
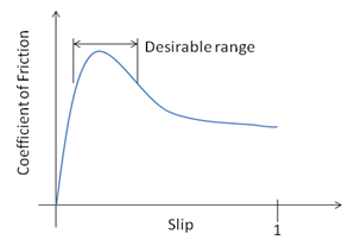
摩擦力 作用在轮胎圆周上的是摩擦系数的乘积 乘以车轮的重量 . 除以车辆质量等于车辆减速,可以积分得到车辆速度。
理想情况下,使用防抱死制动控制器开关控制基于实际滑移量和期望滑移量之间的误差。所要求的滑移值是一个常数,它对应于滑移曲线达到峰值的滑移值。有关更多信息,请参见防抱死制动系统的建模.
指定车型参数
为本例定义以下车辆参数。
米——车辆质量W——车重B-车轮阻尼扭矩系数Rr——车轮半径我——轮惯性
m = 400;W = m * 9.81;B = 0.01;Rr = 0.3;I = 1;
同时,指定车辆的初始前进速度半和初始车轮角速度x0.
v0 = 120/3.6;w0 = 400/3.6;
防抱死制动系统极值寻优控制
对于这个ABS例子,你设计一个极值寻求控制器,使摩擦系数最大化,这是滑移系数的函数,如下面的方程所示。
在这里, 和 分别为理想的摩擦系数和滑移系数。实际的摩擦 = 当达到滑移系数时 等于理想滑移系数 .ABS通过控制制动力矩(这是滑移和摩擦系数的函数)来实现最大减速和最短停止距离的目标。
金宝app利用Simulink控制设计软件实现了ESC算法极值寻求控制块。对于本例,打开ExtremumSeekingControlABS模型,其中包括这个块和一个ABS系统模型。
mdl =“ExtremumSeekingControlABS”;open_system (mdl)
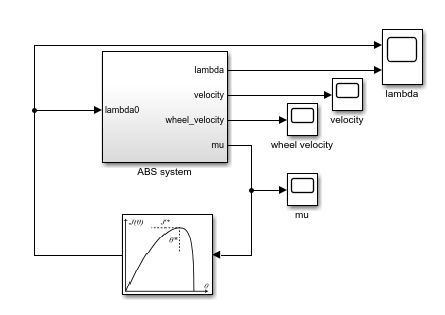
极值寻优控制块的输出是滑移系数 .由于ESC控制器将值最大化 ,使用此值作为块的目标函数输入。
指定滑移系数的初始猜想。
IC = 0.15;
同时,指定理想滑移系数lambda_star和理想摩擦系数mu_star.
lambda_star = 0.25;mu_star = 0.6;
极值搜索控制块使用调制信号来扰动参数值。然后,在计算参数更新之前,对目标函数信号中产生的变化进行解调。为这个块配置寻极值控制参数。
首先指定要调优的参数数量(N)及学习速率(lr).
N = 1;lr = 0.3;
通过指定解调和调制信号的频率(ω)、阶段(phi_1和phi_2)和振幅(一个和b).
ω= 0.7;%迫使频率= 1;%解调振幅b = 0.02;%调制振幅phi_1 =π/ 2;%解调相位phi_2 = 0;%调制阶段
对于这个例子,使用低通滤波器从解调信号中去除高频噪声,使用高通滤波器从受扰动的目标函数信号中去除偏置。指定这些滤波器的截止频率。
omega_lpf = 1;omega_hpf = 0.5;
模拟防抱死制动系统
模拟模型。
sim (mdl);
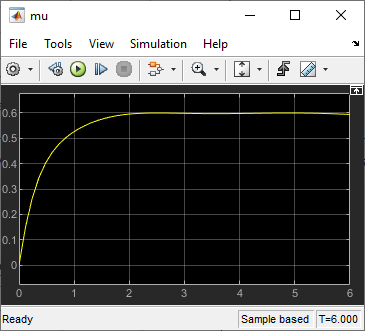
查看摩擦系数模拟结果。在两秒, 达到最大值。
open_system ([mdl' /亩])
查看车辆速度和车轮角速度,两者在制动模拟过程中均为零。
open_system ([mdl' /速度'])
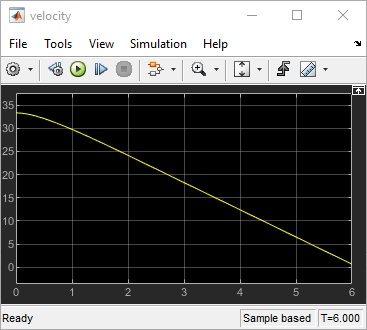
open_system ([mdl/车轮速度的])

bdclose (“ExtremumSeekingControlABS”)
参考
[1] Ariyur, Kartik B., Miroslav Krstić。基于极值寻优控制的实时优化.霍博肯:威利综合科学,2003。
另请参阅
块
相关的话题
你也可以从以下列表中选择一个网站: