导航工具箱
设计、模拟和部署自主导航算法
导航工具箱™ 提供用于运动规划、同步定位和映射(SLAM)以及惯性导航的算法和分析工具。工具箱包括可自定义的基于搜索和采样的路径规划器,以及用于验证和比较路径的度量。您可以创建二维和三维地图表示,使用 SLAM算法,并使用SLAM map builder应用程序以交互方式可视化和调试地图生成。工具箱提供用于定位的传感器模型和算法。您可以模拟和可视化IMU、GPS和车轮编码器传感器数据,并调整融合过滤器以进行多传感器姿态估计。
为自动驾驶、机器人和消费电子应用提供了参考示例。您可以通过将导航算法直接部署到硬件(使用MATLAB编码器)来测试它们™ 或Simulink编码器™).金宝app




产品资源:
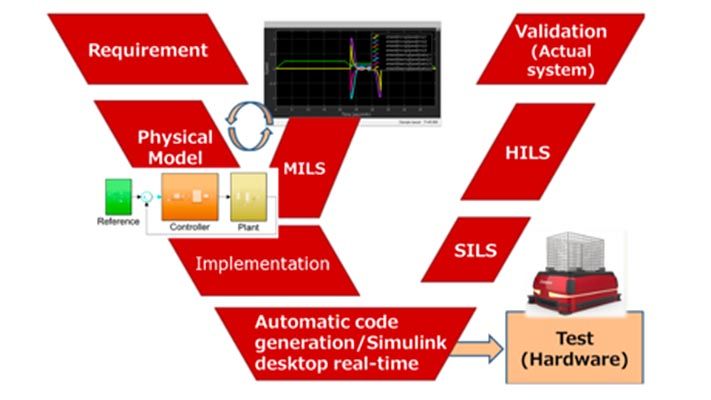
“使用MATLAB和Simulink金宝app,我们为运动控制器设计了一个原型,并在一个月内在硬件上进行了测试。通过进行仿真,对定位算法进行了评估,并阐明了面临的挑战。”
武藏精光实业有限公司竹本春树和Kenneth Renny Simba。


