强化学习工具箱
使用强化学习设计和培训政策

强化学习工具箱™提供了使用加强学习算法的培训策略的功能和块,包括DQN,A2C和DDPG。您可以使用这些策略来实现用于机器人和自主系统等复杂系统的控制器和决策算法。您可以使用深神经网络,多项式或查找表来实施策略。
工具箱允许您通过使策略与MATLAB表示的环境交互来培训策略®或仿真金宝app软件®模型。您可以评估算法,使用HyperParameter设置进行实验,并监控培训进度。为了提高培训性能,您可以在云,计算机集群和GPU上并行运行模拟(使用并行计算工具箱™和MATLABPrild Server™)。
通过Onnx™模型格式,现有的策略可以从DENE学习框架导入Tensorflow™Keras和Pytorch(具有深度学习工具箱™)。您可以生成优化的C,C ++和CUDA代码,以在微控制器和GPU上部署培训的策略。
工具箱包括使用强化学习为机器人和自动驾驶应用设计控制器的参考示例。
开始:

强化学习算法
使用深Q-Network(DQN)实现代理,最佳影评人(A2C),深度确定性政策梯度(DDPG)和其他内置算法。使用模板来实现自定义代理进行培训策略。

代理由策略和算法组成。
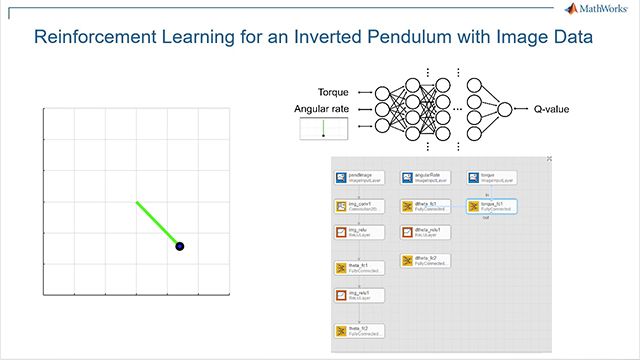
基于深度神经网络的策略和值函数表示
使用大型状态动作空间的复杂系统使用深神经网络策略。使用深度学习工具箱的网络和体系结构定义策略。导入与其他深度学习框架互操作性的ONNX模型。


强化学习代理模块的Simulink。金宝app
金宝appSimulink和Simscape环境
使用Si金宝appmulink和Simscape™模型来表示环境。在模型中指定观察、行动和奖励信号。

金宝app一个倒立摆的Simulink环境模型。
MATLAB环境中
使用MATLAB函数和类来表示环境。在MATLAB文件中指定观察,操作和奖励变量。

MATLAB环境下的车杆系统。
分布式计算和多核加速度
使用并行计算工具箱和计算群集在多核计算机,云资源或计算群集上运行并行模拟来加速培训MATLAB并行服务器.

使用并行计算加速训练。
GPU加速
使用高性能NVIDIA加速深度神经网络训练和推理®gpu。使用MATLAB并行计算工具箱和大多数CUDA®- 具有的全文NVIDIA GPU计算能力3.0或更高.

使用GPU加速培训。
代码生成
使用GPU编码器™从Matlab代码生成优化的CUDA代码,代表培训的策略。使用MATLAB编码器™生成C/ c++代码来部署策略。

使用GPU编码器生成CUDA代码。
MATLAB编译器支持金宝app
使用Matlab Compiler™和MATLAB编译器SDK™将经过培训的策略部署为C/ c++共享库,微软®.NET装配,Java®Python类,®包裹。

将策略打包并共享为独立的程序。
开始
针对诸如平衡倒立摆、导航网格世界问题和平衡车杆系统等问题,实现基于强化学习的控制器。

解决一个网格世界迷宫。

培训一条车道保持援助系统。
机器人
使用强化学习为机器人设计控制器。

培养机器人使用强化学习走路。

