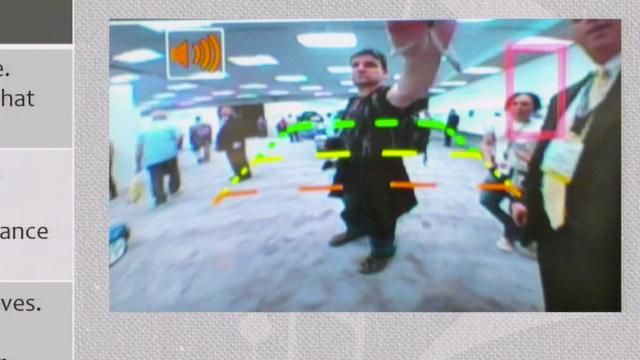
传统上,仪器组(IC)的验证依赖于人的视觉感知,这很容易出错。因此,通过计算机视觉算法的应用,提高了辅助驾驶视图(ADV)的准确性评估。ADV描绘了多达五辆周围的车辆,每一辆都被确定为汽车、卡车或摩托车。
对于ADV场景,将测试输出与地面真实值进行比较。外部摄像机在IC接口上记录每个ADV场景的视频片段。机器学习模型可以识别所描述的车辆的位置和类型。随后,对收集的数据进行比较,并自动报告差异。
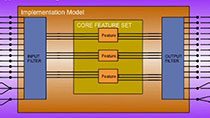
视频帧使用帧配准技术进行校准。ground truth对象被连续地标记。因此,可以获得训练数据,用于开发基于运动的多目标检测器。
机器学习模型可以验证新软件版本中ADV的准确性,与已验证的标准版本相比。此外,ADV的准确性可以从实际驾驶中不同的天气和照明条件下进行评估。研究方法为ADV提供了有效的端到端测试。