该视频显示了如何将模糊逻辑控制器集成到Simulink模型。金宝app在这个特殊的模式,要控制在模拟水槽中的水位是子系统。水箱有水流入一个管,另一个用于水外流。它可以调节阀控制流入。但流出速率取决于流出管,其是恒定的直径,并且压力硬化的罐,该罐的忧虑是水位。
显然,该系统具有一些非常非线性的特性。为了将模糊逻辑控制器添加到这个模块中,我们打开Simulink库浏览器。金宝app在模糊逻辑工具箱库中,在这个规则查看器块中选择模糊逻辑控制器。我们将这个块添加到模型中,并将其连接到模型的其余部分。
正如你所看到的,最终的逻辑控制器有两个输入。第一个是水位错误,这是设定点和测得的水位之间的差值。而第二个输入是水位率的变化。控制器的输出是用于控制罐流入速率计算出的阀位置。
我们打开块对话框,指定模糊推理系统的名称。在我们的例子,这是一个所谓的桶变量。让我告诉你它是从哪里过来。对于这一点,我们去MATLAB。在这里,你会看到在MATLAB工作区这个变量罐。此变量包含FIS系统我们先前设计的,我们希望在Simulink来实现。金宝app
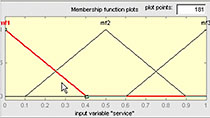
您可以打开模糊推理系统编辑器,并看到我们的FIS系统罐有两个输入和一个输出,符合市场预期。它也可以看到规则的FIS系统实现。在这种情况下,有他们五个。这些规则与输出变量连接两个输入变量。
现在,让我们回到Simulink模型。金宝app这里的这个子系统创建了一个重复的步骤序列,这些步骤指向变化以测试我们的控制器性能。让我们开始模拟。在右边,我们看到动画显示我们正在跟踪设置点。设定值由这条红线表示。
你也可以看到,我们在左边这个图跟踪好。再次,红线是设定点值。而蓝线是实际水位。图的底部示出了阀位置控制器的命令。当我们运行仿真是一个规则浏览器,打开了另一个窗口。它提供了模糊逻辑控制器的状态的图形视图。
每一行对应一个规则,所以5行对应5个规则。图的前两列对应于控制器输入。最后一列对应于控制器输出。系统的最终输出,阀门位置,由粗红线表示,由形心规则确定。
现在,我们可以看看如何是水与不同的输入模糊逻辑控制器水箱的电平变化。如果暂停或停止模拟,我们可以交互地改变输入值,看输出是如何根据我们拥有的规则计算。
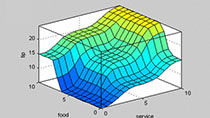
我们还可以查看可以从规则查看器访问的特性。在View选项卡中,我们可以显示控制器规则形成的表面。我们还可以访问三个模糊逻辑工具箱编辑器、FIS属性编辑器、成员函数编辑器和规则编辑器。演示到此结束。