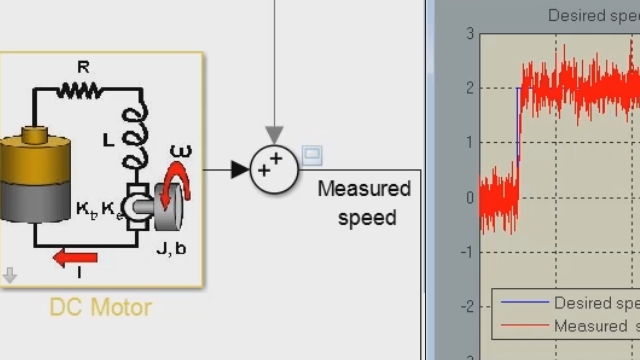
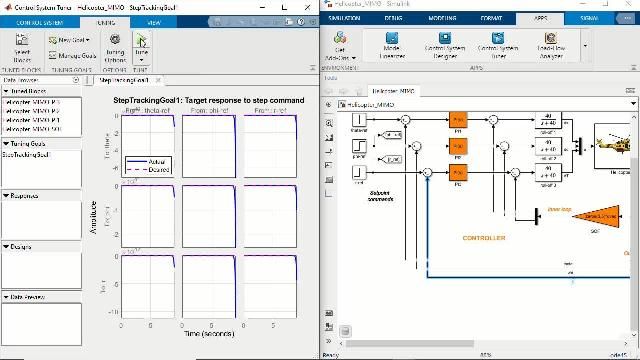
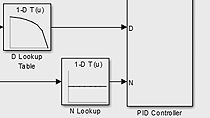
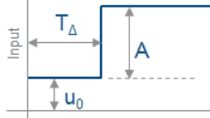
学习如何自动调整级联PID控制器的增益,该控制器控制无刷直流电机的内部电压和外部速度环与梯形反电动势。三相无刷直流电机和三相功率逆变器已在Simscape Electrical™中建模。目标是调整控制器增益,以提供快速和稳定的速度响应,从电机。要做到这一点,闭环PID自动调谐块被使用。这个块在闭环装置运行期间注入激励信号来估计装置的频率响应。利用得到的频率响应自动计算PID增益。看看如何使用闭环PID自动调谐器的内部电压回路,然后在外部速度回路。计算得到的PID增益用于更新模型中PID控制器的参数。通过运行闭环仿真验证了控制器的性能。