理解卡尔曼滤波器
发现真实的情况下,您可以使用卡尔曼滤波器。卡尔曼滤波器常用于最优估计系统的内部状态的不确定和间接测量。背后的工作原理学习卡尔曼滤波器通过观察以下介绍的例子。
你将探索情况下,卡尔曼滤波器是常用的。当系统的状态只能间接测量,你可以使用卡尔曼滤波器最优估计系统的状态。当从不同的传感器可测量但受到噪音,您可以使用一个卡尔曼滤波器结合感官来自各种数据源的数据(称为传感器融合)找到感兴趣的参数的最佳估计。
您还将了解国家观察员通过几个例子,包括简单的数学。这将帮助你了解什么是卡尔曼滤波器,它是如何工作的。在高级别上,卡尔曼滤波器是一种最优状态估计量。视频还包括讨论非线性状态估计、扩展和无味卡尔曼滤波器等。
最后一个例子展示了一个线性系统的状态可以使用卡尔曼滤波器,估计MATLAB®和仿真软件金宝app®。

第1部分:为什么使用卡尔曼滤波器?发现普遍使用卡尔曼滤波器的走过一些例子。卡尔曼滤波器是最优估计算法用于从间接估计系统的状态和不确定的测量。

第2部分:国家观察员学习国家观察员的工作原理,发现背后的数学。使用状态观测器估计系统的内部状态当你不能直接测量。

第3部分:一个最优状态估计量学习卡尔曼滤波器的工作原理。卡尔曼滤波器结合两个来源的信息,预测状态和噪声测量,产生最优无偏状态估计。
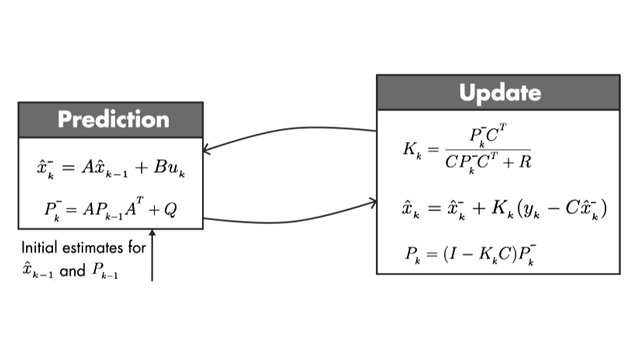
第4部分:最优状态估计算法发现方程需要实现的集合卡尔曼滤波算法。

第5部分:非线性状态估计这个视频解释了非线性状态估计背后的基本概念,包括扩展卡尔曼滤波器,无味卡尔曼滤波器,和粒子过滤器。

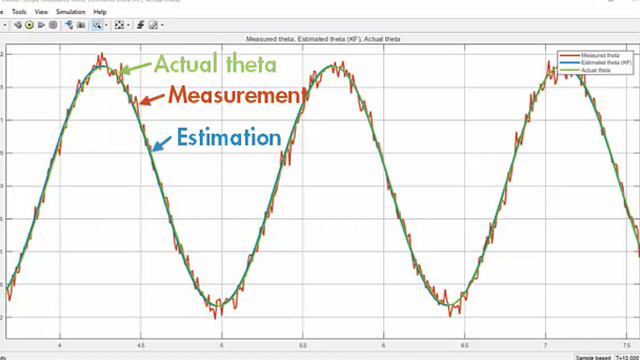
第6部分:如何使用模型的卡尔曼滤波器金宝app估计单摆系统的角位置使用卡尔曼滤波器模型。金宝app您将学习如何配置系统卡尔曼滤波块等参数模型,初始状态估计,和噪声特性。
第7部分:如何使用一个扩展的卡尔曼滤波模型金宝app估计非线性摆角位置的系统使用一个扩展的卡尔曼滤波器。您将学习如何指定扩展卡尔曼滤波状态转换和测量等功能块参数,并生成C / c++代码。