 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家金宝app仿真软件子系统Stateflow州
今天我想强调一个新功能使连续时间建模Stateflow更清晰和更强大的:金宝app仿真软件子系统的状态。
背景
如果你不知道,对于许多版本,可能在Stateflow做连续时间模型。
模拟模型,您需要一个工厂有离散模式或离散事件建模的植物Stateflow可以方便。看到这样的例子,我推荐看看弹力球,或者是牛顿Craddle的例子。
基于模型我收到的技术支持,用户通常做什么当他们需要模型连续与离散模式植物,他们将金宝app使用仿真软件模块模型的连续方程,他们将在Stateflow实现模式转换逻辑。金宝app一个例子是离合器的例子R2017a,它看起来像这样:

如果你试过建立这样一个系统,你很有可能遇到如下所示的错误。原因是Stateflow逻辑需要连续系统的输出,和连续系统由Stateflow控制图,创建一个循环。

在接下来的例子中,您将看到与仿真软件子系统的状态,我们现在能够把连续建模算法和块Statefl金宝appow内部,避免所有这些数据依赖的挑战
金宝app仿真软件子系统的状态
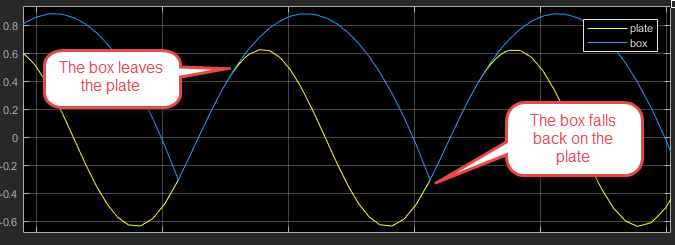
为了演示这个功能,我决定模型一盒板上下移动。当板移动缓慢,盒子和板一起行动。如果板移动快,箱子可能离开板,空气中自由下落。
在第一种情况下,系统动力学可以建模为:

在第二种情况下,这看起来像:

在Stateflow包括两个子系统,我添加两个模型状态的粘贴上面所示的子系统。金宝app的尺寸和外港块子系统的输入和输出将自动成为Stateflow图表。

然后我需要名字每个集成块的状态。这些名称将在下一步中用于传输时的状态切换模式。

一旦这样做,我可以定义的逻辑这两个模式之间进行切换。
当负方向的加速度大于重力,盒子会开始飞行。在相反的方向,如果盒子瀑布和立场变得较小或等于板,它的土地并再次开始移动的板。定义这些转换,我可以使用图表的输入和输出,以及明确命名如上所述。
每次切换发生时,我们转移美国的积分器模块激活子系统被初始化,最后值的积分器模块子系统被停用。

就是这样,这么简单!没有仿真软件子系统的状态金宝app,这个系统建模会耗费更多的块和连接。
我现在可以使用PID控制器来控制盘的运动。

如果我应用与高频正弦运动,结果表明箱子跳上板:
现在轮到你了
如何仿真软件子系统状态金宝app可以影响语义建模,我建议比较离合器的例子R2017a和R2017b。这应该使这个特性简化了语义一目了然。
给这一个尝试在下面的评论中让我们知道你的想法。
- 类别:
- 建模、
- Stateflow,
- 有什么新鲜事吗?


另请参阅
-

复位子系统呢?
博客
-
-




评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。