TuningGoal.Marginsclass
包:TuningGoal
稳定保证金要求控制系统调优
描述
使用TuningGoal.Margins指定一个调优目标输出的增益和相位利润率或天线系统反馈回路。你可以使用这个验证调整控制系统的优化目标viewGoal。您还可以使用的调优目标控制系统优化等优化命令systune或looptune。
在您创建一个优化目标,进一步通过设置您可以配置它属性的对象。
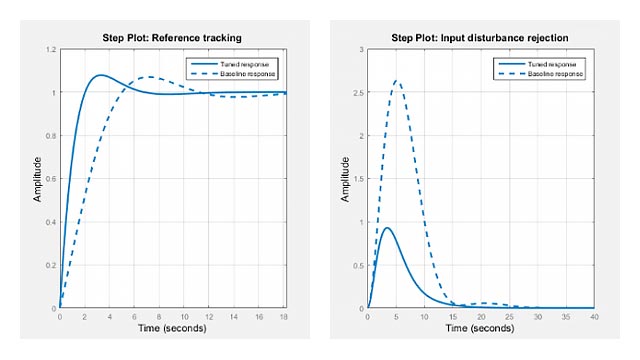
后使用的调优目标优化控制系统,您可以可视化优化目标和优化值使用viewGoal命令。解释利润目标的信息,请参阅稳定的利润控制系统调优。
建设
要求的事情= TuningGoal.Margins (位置,gainmargin,phasemargin)
输入参数
|
位置控制系统的最小增益和相位的利润率,指定为一个特征向量或单元阵列特征向量识别一个或多个位置控制系统的优化。什么位置可用取决于你是什么样的系统调优:
保证金要求适用于点对点,开环传递函数在指定loop-opening位置。传递函数是开环反应获得的注入信号在指定的位置,并测量返回信号在同一点。 如果 |
|
所需的最小增益裕度反馈回路,在dB指定为一个标量值。 获得的增益裕度表明多少开环反应可以增加或减少而不失去稳定性。例如,
|
|
所需的最小相位反馈循环保证金,指定为一个标量值度。 阶段保证金表明多少阶段的开环反应可以增加或减少而不失去稳定性。例如,
|
属性
|
所需的最小增益裕度反馈回路,指定为一个标量值分贝(dB)。 的值 |
|
所需的最小相位反馈循环保证金,指定为一个标量值度。 的值 |
|
控制订单(州)落下的石块参与计算的分布式天线稳定利润。静态落下的石块( 默认值:0(静态扩展) |
|
频带的调优的目标是执行,指定为一个行向量的形式 设置 要求的事情。专注= [1100]; 默认值: |
|
位置的最小增益和相位的利润率,指定为一个单元阵列特征向量识别一个或多个分析分控制系统调优。例如,如果 的值 |
|
应用模型的优化目标,指定为一个向量的指数。 使用 要求的事情。模型= 2:4; 当 默认值: |
|
反馈回路打开当评估优化目标,指定为一个单元阵列特征向量识别loop-opening位置。调优的目标是评估针对开环配置由开放位置您识别反馈循环。 如果您使用的是调优目标优化控制系统仿真软件模型,金宝app 如果您使用的是调优目标优化广义状态空间( 例如,如果 默认值: |
|
调优目标名称,指定为一个特征向量。 例如,如果 要求的事情。的名字='LoopReq'; 默认值: |
例子
输出保证金要求评估额外的循环
创建一个保证金要求的内循环下面的控制系统。要求征收至少5 dB的增益裕度和最小相位的40度。

创建一个系统的模型。为此,指定并连接数字工厂模型G1和G2,可调控制器C1和C2。还指定和连接AnalysisPoint块AP1和AP2马克的兴趣点进行分析和调优。
G1 =特遣部队(10、10 [1]);G2 =特遣部队([1 - 2],[1 0.2 10]);C1 = tunablePID (“C”,“π”);C2 = tunableGain (‘G’1);AP1 = AnalysisPoint (“AP1”);AP2 = AnalysisPoint (“AP2”);T =反馈(G1 (G2 * C2, AP2) * *反馈C1, AP1);
创建一个调优需求对象。
要求= TuningGoal.Margins (“AP2”5、40);
这个要求对指定的稳定利润的确定的反馈回路AnalysisPoint通道“AP2”,这是内循环。
指定这些利润评估的外循环控制系统开放。
要求的事情。机会= {“AP1”};
添加“AP1”到开口确保产权优化需求的对象systune评估的需求循环开放在这个位置。
使用systune调优的自由参数T以满足指定的优化要求要求的事情。然后,您可以使用viewGoal验证优化控制系统要求。
米姆在频带保证金要求
创建要求集最小增益和相位的利润三个loop-opening位置定义的循环控制系统调优。因为这个循环被定义为三个loop-opening地点,这是一种循环。
要求设置一个最小10 dB的增益裕度和最小相位的40度,在乐队0.1到10 rad / s。
要求= TuningGoal.Margins ({“r”,“θ”,“φ”}10 40);
的名字“r”,“θ”,“φ”必须指定有效loop-opening位置控制系统调优。
限制要求0.1和10之间的频带rad / s。
要求的事情。专注= 0.1 [10];
提示
这个调优目标强加了一个隐式约束闭环测量灵敏度函数的稳定性
位置评估循环打开,点确定开口。这个隐式约束的动力学影响稳定的动力学调优目标。的MinDecay和MaxRadius选项的systuneOptions对这些隐式约束动力学控制范围。如果优化不能满足默认的边界,或者默认的边界冲突与其他需求,使用systuneOptions更改这些默认值。
算法
当你调整控制系统使用TuningGoal,软件优化的目标转换成规范化的标量值f(x),x是免费的(可调)的矢量控制系统参数。软件然后调整参数值最小化f(x)或开车f(x)低于1如果调优的目标是硬约束。
为TuningGoal.Margins,f(x)是由:
年代=D1(我- - - - - -l(年代,x)]1D是按比例缩小的灵敏度函数。
l(年代,x)是形状的开环反应。
D是一个automatically-computed循环比例因子。更多信息D,请参阅稳定的利润控制系统调优。
α是一个标量参数计算从指定的增益和相位裕度。更多信息α,请参阅使用磁盘边缘稳定性分析(鲁棒控制工具箱)。
兼容性的考虑
另请参阅
looptune|systune|systune (slTuner)(金宝app仿真软件控制设计)|looptune (slTuner)(金宝app仿真软件控制设计)|viewGoal|evalGoal