评估增益和相位裕度
这个例子展示了如何检验稳定裕度对控制系统闭环响应特性的影响。
反馈回路的稳定性
稳定性通常意味着所有内部信号保持有界。这是控制系统的标准要求,以避免失去控制和损坏设备。对于线性反馈系统,稳定性可以通过观察闭环传递函数的极点来评估。例如,考虑SISO反馈回路:

图1: SISO反馈回路。
为单位环路增益k,可以计算闭环传递函数T使用:
G=tf([51.3],[11.21.60]);T=feedback(G,1);
求极点T,类型
电杆(T)
Ans = -0.2305 + 1.3062i -0.2305 - 1.3062i -0.7389 + 0.00000 i
反馈回路k=1是稳定的,因为所有极点都有负实部。
稳定有多稳定?
检查闭环极点给了我们一个稳定性的二元评估。在实践中,了解稳定性的健壮性(或脆弱性)更有用。鲁棒性的一个指标是在失去稳定性之前环路增益可以改变多少。您可以使用根轨迹图来估计的范围k循环稳定的值:
rlocus (G)

点击轨迹与y轴相交的点,表明该反馈回路在以下时间内是稳定的

这个范围表明k=1在你失去稳定性之前,环路增益可以增加270%。
增益和相位裕度
环路增益的变化只是鲁棒稳定性的一个方面。一般来说,不完美的植物模型意味着增益和相位都不确切知道。因为建模误差在增益交叉频率(开环增益为0dB的频率)附近最具破坏性,所以在这个频率上可以容忍多少相位变化也很重要。
相位裕度测量在增益交叉频率上需要多少相位变化才能失去稳定性。类似地,增益裕度测量在增益交叉频率上损失稳定性所需的相对增益变化。这两个数字一起给出了闭环稳定性的“安全边际”的估计。稳定性边际值越小,稳定性越脆弱。
您可以在Bode图上显示增益和相位裕度,如下所示。首先创建图:
波德(G)、网格

然后,右键单击图并选择特性->最小稳定裕度子菜单。最后,点击蓝点标记。结果图如下图所示:

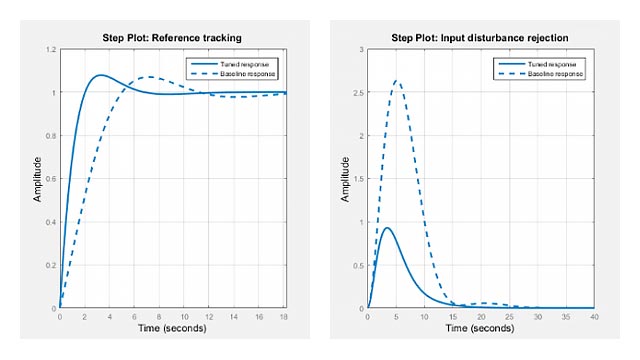
这表明增益裕度约为9 dB,相位裕度约为45度。相应的闭环阶跃响应显示约20%的超调和一些振荡。
步骤(T)、标题(' k=1时的闭环响应')

如果我们增加增益到k=2,稳定裕度降低到
(通用、Pm) =利润率(2 * G);GmdB = 20 * log10(通用)%增益裕度(dB)点%相位裕度
GmdB=2.7471 Pm=8.6328
闭环响应有很差的阻尼振荡,这是接近不稳定的标志。
(2 * G, 1)步骤(反馈),标题(' k=2的闭环响应')

多重增益或相位交叉系统
一些系统具有多个增益交叉或相位交叉频率,这导致多个增益或相位裕度值。例如,考虑反馈环路。

图2:反馈回路与多相交叉
系统的闭环响应k=1是稳定的:
7 [1] G =特遣部队(20日)*特遣部队(3.2 - 7.2[1],[1 -1.2 - 0.8])*特遣部队([1 8 400],[700]33);T =反馈(G, 1);步骤(T)、标题(' k=1时的闭环响应')

为了评估这个循环有多稳定,绘制它的波德响应:
波德(G)、网格
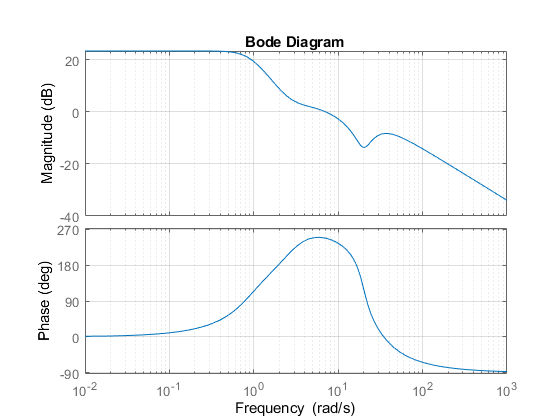
然后,右键单击图并选择特性->所有稳定裕度子菜单显示所有交叉频率和相关的稳定裕度。结果图如下所示。

注意,有两个180度相位交叉,对应的增益边界为-9.35dB和+10.6dB。负增益裕度表明通过减少增益而失去稳定性,而正增益裕度表明通过增加增益而失去稳定性。这是通过绘制闭环阶跃响应的正负6dB增益变化约k=1:
k1=2;T1=反馈(G*k1,1);k2=1/2;T2=反馈(G*k2,1);步骤(T,“b”,T1,“r”,T2,‘g’,12),图例(“k=1”,‘k=2’,“k=0.5”)

该图显示了较小和较大增益值的振荡增加。
可以使用该命令allmargin计算所有稳定裕度。请注意,增益裕度表示为增益比,而不是dB。使用mag2db将值转换为dB。
m=allmargin(G)GainMargins_dB=mag2db(m.GainMargin)
m = struct with fields: GainMargin: [0.3408 3.3920] GMFrequency: [1.9421 16.4807] phasemargar: 68.1178 PMFrequency: 7.0762 DelayMargin: 0.1680 DMFrequency: 7.0762 Stable: 1 GainMargins_dB = -9.3510 10.6091
另请参阅
相关话题
您还可以从以下列表中选择网站: