导航的工具箱
自主导航设计,模拟和部署算法
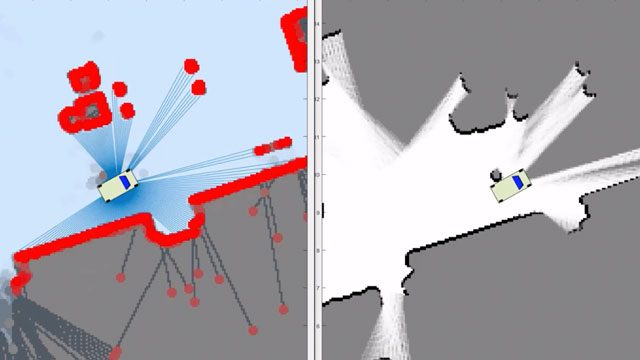
导航工具箱™为运动规划、同步定位和映射(SLAM)和惯性导航提供算法和分析工具。工具箱包括可定制的基于搜索和抽样的路径规划器,以及用于验证和比较路径的度量。您可以创建2D和3D地图表示,使用 SLAM算法生成地图,并使用SLAM地图生成器应用程序交互式地可视化和调试地图生成。工具箱提供了用于定位的传感器模型和算法。您可以模拟和可视化IMU、GPS和车轮编码器传感器数据,并为多传感器姿态估计调整融合滤波器。
参考例子提供了自动驾驶,机器人和消费电子应用。您可以通过将导航算法直接部署到硬件(使用MATLAB Coder™或Simulink Coder™)来测试导航算法。金宝app



产品资源:
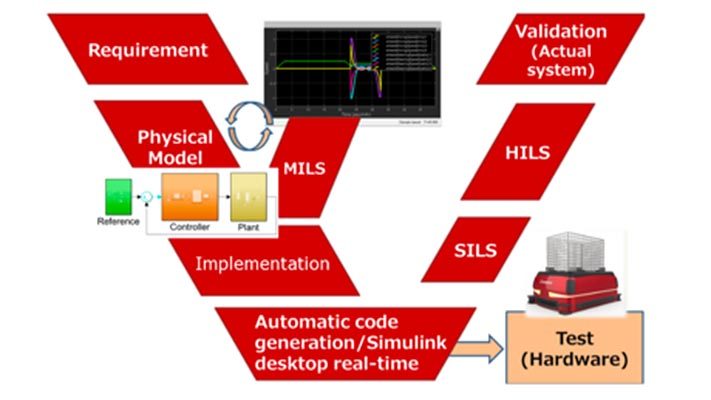
“使用MATLAB和SIMULINK金宝app,我们为运动控制器设计了一种原型,并在一个月内在硬件上测试。评估本地化算法,通过执行模拟阐明挑战。“
武藏精光实业有限公司武藏精光株式会社Haruki Takemoto、Kenneth Renny Simba

获得免费试用
30天的探索触手可及。

不知道从哪里开始?
让我们知道我们能如何帮助你。


