无人机仿真是对无人机或无人机(UAV)进行行为建模并评估其在虚拟环境中的性能。
仿真是无人机发展的重要一步。MATLAB®和无人机的工具箱金宝app通过使您能够提供给无人机仿真:
创建一个无人机仿真通常由以下组件组成,可以在MATLAB中构建®和金宝app®:
- 无人机动力学模型(植物模型)组成的无人机的运动方程
- 无人机飞行控制模型它模拟了无人机的控制逻辑
- 传感器模型模拟无人机上的传感器,如全球定位系统(GPS)和INS传感器
- 自治的算法感知环境,识别障碍
- 仿真环境等长方体的世界和虚幻引擎®,这些虚拟环境是用来测试算法和可视化飞行行为的
无人机仿真可以根据你所测试的算法和开发过程的阶段有不同的逼真度。
低保真无人机模拟在开发过程的早期使用,使用较少的计算资源,并且运行迅速。例如,它们可以用来调整飞行控制模型或测试路径规划算法。
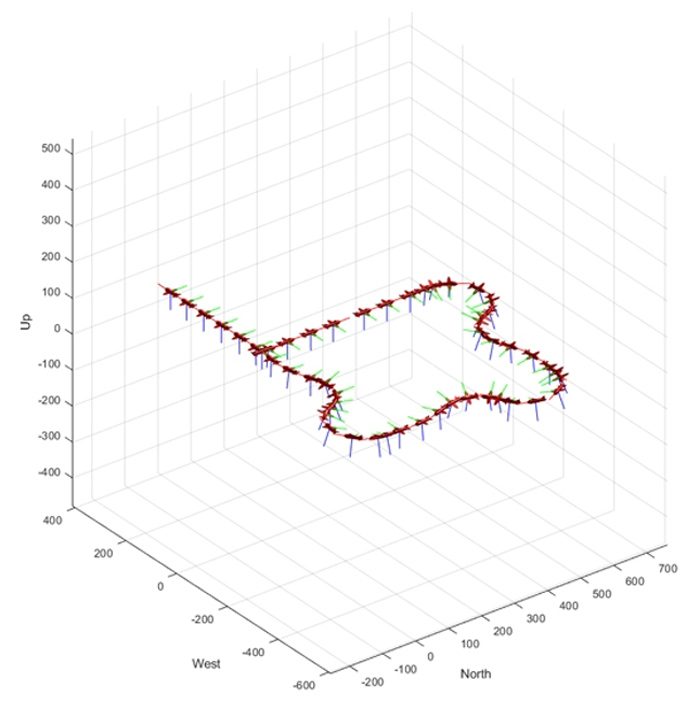
利用MATLAB仿真低保真无人机制导模型块。(代码示例)
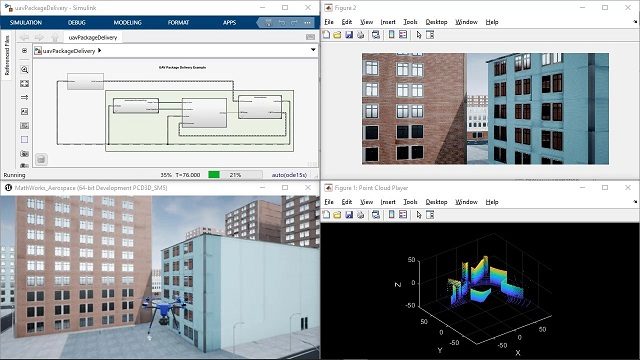
高保真无人机模拟在一个更接近真实世界的虚拟环境中测试无人机的应用。它们可能是计算密集型的,需要更长的运行时间。例如,它们可以用于测试基于激光雷达和相机的自主算法或者在天气条件下测试无人机的行为。

高保真无人机仿真使用仿真三维场景配置块。(代码示例)