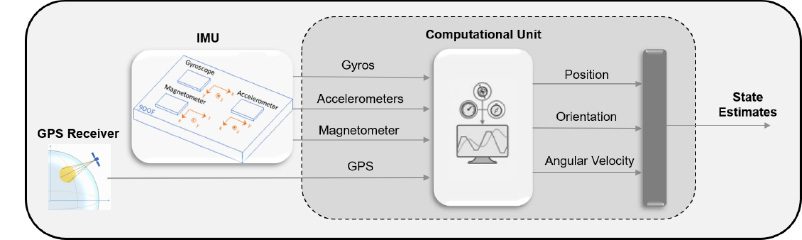
使用GPS辅助惯性导航系统MATLAB的状态估计工作流程。
虽然GPS可以使用恒定的外部输入提供绝对测量,但是惯性导航系统提供了初始参考的相对测量。这些相对测量可以随时间累积漂移误差。在存在GPS之前,火箭队配备有惯性导航系统,其中初始位置由人类操作员提供。
如今,大多数户外车辆和平台都配备了GPS辅助惯性导航系统,这些导航系统可以结合两个传感器测量。恒定的GPS输入减少了漂移误差,并且当GPS信号丢失时,惯性导航系统可以根据最后一个已知状态使用死者来单独使用。想象一辆车进入隧道。GPS接收器将失去其信号,但惯性导航系统可以基于在汽车进入隧道之前接收的GPS信号提供相对运动。
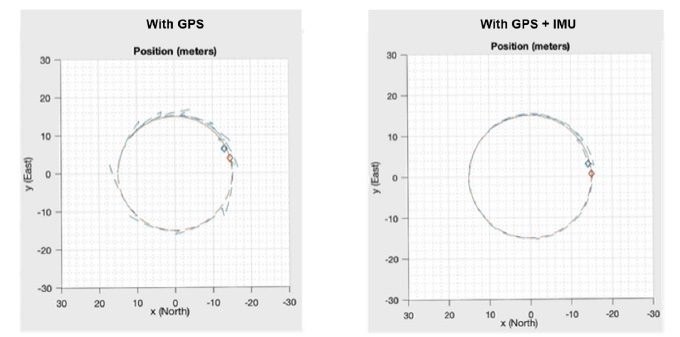
用GPS和GPS与MATLAB中的IMU传感器模型的位置估计比较。
使用MATLAB和SIMULIN金宝appK,您可以模拟与特定数据表参数匹配的单独惯性传感器。您可以开发,调整和部署惯性融合过滤器,您可以调整过滤器以考虑对模拟实际效果的环境和噪声属性。
使用MATLAB和SIMULINK金宝app,您可以:
- 模型IMU和GNSS传感器并生成模拟传感器数据
- 使用Allan方差校准IMU测量值
- 为传感器模型生成地面真相运动
- 来自加速度计,陀螺和磁力计传感器的熔断原始数据,用于定向估计
- 来自IMU和GPS传感器的流和保险丝数据,用于姿势估计
- 使用自动滤波器调整本地化车辆
- 来自IMU,GPS,高度计和车轮编码器传感器的熔化原始数据,用于GPS拒绝区域的惯性导航
您还可以通过使用C / C ++代码来部署筛选器Matlab Coder™。