点云是一组数据点的集合,其中数据集的各个点表示现实世界中被扫描对象的表面点的坐标。点云用于测量真实世界的场景,通常由激光雷达扫描仪和其他设备产生。点云处理用于增强现实(AR)和虚拟现实(VR)应用,以及机器人和自动驾驶中的感知和导航。
公共点云处理任务包括:
- 读取和写入点云数据进行分析和显示
- 转换、过滤和注册3D点云
- 将三维点云分割成簇,并根据几何形状进行拟合
点云处理工作流的主要组件有:
- 读取和可视化数据
- 记录并缝合一系列的点云
- 将点云数据分割为集群

读取并可视化数据示例:车载点云数据可视化。

注册和缝合一系列点云的例子:使用迭代最近点(ICP)算法对场景进行三维重建。
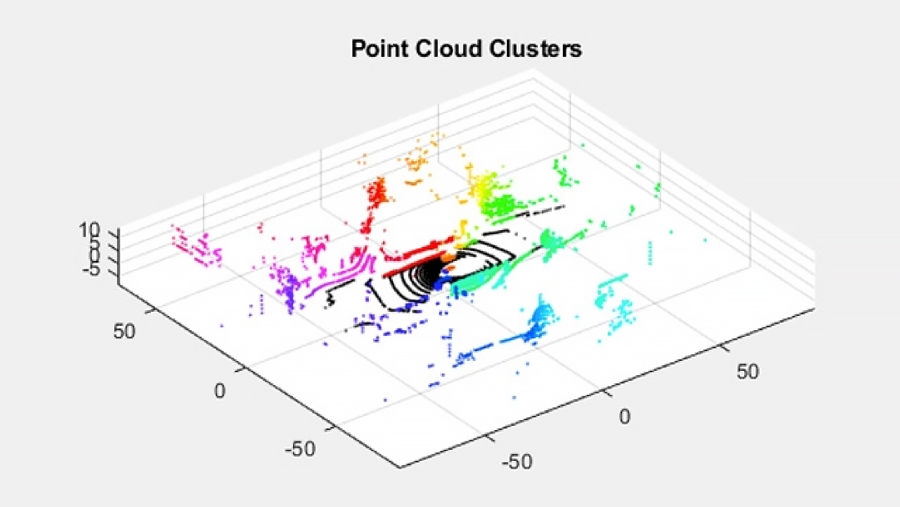
Segmenting point cloud data into clusters example: organized lidar data that is segmented into clusters. The points in black represent ground points, and the colored points represent potential obstacles.
" data-toggle="lightbox">
{kind=link}

将点云数据分割成集群的例子:有组织的激光雷达数据,分割成簇。黑色的点表示地面点,彩色的点表示潜在的障碍。
有关详细信息,请参见计算机视觉工具箱™。