帮助中心帮助中心
这些例子应用了传感器融合和过滤技术来使用IMU、GPS和摄像头数据来本地化平台。
基于手持惯性测量单元识别手势。
如何构建适合无人机或四轴飞行器的IMU + GPS融合算法。
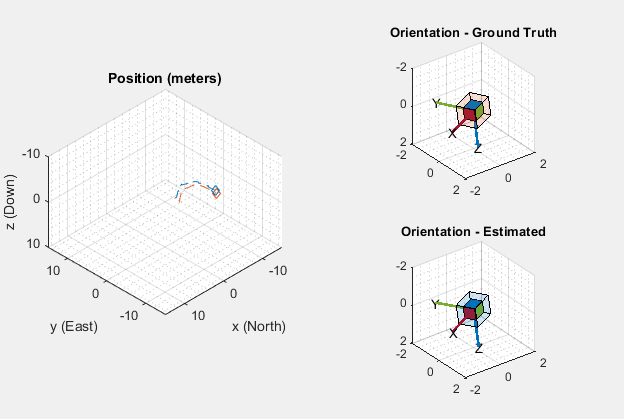
通过融合来自惯性测量单元(IMU)和全球定位系统(GPS)接收器的数据来估计地面车辆的位置和方向。
使用惯性测量单元(IMU)和单目摄像机估计地面车辆的姿态(位置和方向)。
Ha hecho clic en unenlace que对应一个este commando de MATLAB:
弹射突击队introduciéndolo en la ventana de commandos de MATLAB。Los navegadores web no permission comandos de MATLAB。
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:.
您也可以从以下列表中选择一个网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
联系当地办事处