基于ekf的Landmark SLAM
这个例子展示了如何使用ekfSLAM使用扩展卡尔曼滤波器(EKF)算法和最大似然算法进行数据关联,实现可靠的地标同步定位和映射(SLAM)。在本例中,您将创建车辆周围环境的地标地图,并同时跟踪车辆的路径。通过使用噪声控制命令移动车辆来生成轨迹,并使用它在路径上遇到的地标形成地图。通过再次观察地标来修正车辆轨迹和地标估计。
负载数据集
加载维多利亚公园数据集的修改版本,其中包含控制器输入、测量、GPS纬度和经度,以及使用控制器输入和运动模型生成的航位推算。
负载(“victoriaParkDataset.mat”,“controllerInput”,...“测量”,“gpsLatLong”,“deadReckoning”);
设置参数
指定初始车辆状态和状态协方差。
initialState = [gpsLatLong(1,2) gpsLatLong(1,1) deg2rad(37)]';initialCovar = eps*eye(3);
在速度和转向命令中指定过程噪声协方差。
sigmaVelocity = 2;%(米/秒)sigmaSteer =函数(6);% (rad)processNoise = [sigmaVelocity^2 0;0 sigmaSteer ^ 2);
指定距离和方位的测量协方差。
sigmaRange = 1;% [m]sigmaBearing = deg2rad(3);% (rad)measCovar = [sigmaRange^2 sigmaBearing^2];
指定检查关联地标的最大范围。
maxSensorRange = 30;% [m]
指定车辆移动的时间步长。
timeStep = 0.025;%(秒)
指定数据关联功能的阈值,nav.algs.associateMaxLikelihood.地标性拒绝阈值为卡方(
)分布表的值为95%正确的关联。
landmarkRejectionThres = 5.991;%最大关联距离landmarkAugmentationThres = 200;%新建地标的最小距离validationGate = [landmarkRejectionThres landmarkAugmentationThres];
设置一个标志,该标志决定在运行期间是否绘制映射。
plotOnTheRun = false;
从数据集中得到样本的数量。
numSamples = size(controllerInput,1);
初始化图形或进度条
如果启用了实时绘图选项,则创建一个新图形并为绘制各种组件设置句柄。否则,创建一个等待条,该等待条根据已执行的数据集的比例进行更新。设置等待栏,以便单击“取消”停止正在进行的计算。关闭等待栏将停止执行。
如果plotOnTheRun [robotHandle covarianceHandle sensorHandle,...observationHandle landmarkHandle,...deadRecHandle estTrajHandle] =...exampleHelperInitializeVisualizationEKFSLAM (initialState gpsLatLong);其他的waitBarHandle = waitbar(0,“初始化例子…”,...“名字”,“ekfSLAM例子”,...“CreateCancelBtn”,“setappdata (gcbf,“取消”,1)');setappdata (waitBarHandle“取消”, 0);结束

设置ekfSLAM
配置ekfSLAM对象使用车辆的初始状态,初始状态协方差,过程噪声协方差,以及车辆的运动模型。
ekfSlamObj = ekfSLAM(“状态”initialState,...“StateCovariance”initialCovar,...“StateTransitionFcn”, @exampleHelperVictoriaParkStateTransition);ekfSlamObj。ProcessNoise = ProcessNoise;ekfSlamObj。MaxAssociationRange = maxSensorRange;
主循环
主循环由以下主要操作组成:
预测—根据控制命令和当前状态预测下一个状态。
具有里程碑意义的提取-获取环境中的地标。
修正-使用观察到的地标更新状态和状态协方差。
预测
在本例中,车辆根据控制输入相对于其先前的状态移动,而地标保持静止。因此,只有车辆的状态被传播。利用车辆的运动模型,利用数据集将车辆的状态传播到下一个时间步。
的预测方法中指定的函数StateTransitionFcn的属性ekfSlamObj来预测飞行器的状态。的预测方法将控制输入、其他必要输入和当前车辆姿态传递给StateTransitionFcn。
为count = 1:numSamples predict(ekfSlamObj,controllerInput(count,:),timeStep);
具有里程碑意义的提取
本例使用从数据集中观察到的地标列表,因此不必使用传感器从环境中提取地标。这些标志来自车辆前方的半圆形区域。半圆形区域的半径由传感器的最大范围定义。
observedLandmarks =测量{计数};
修正
的ekfSLAM对象根据给定的测量值纠正状态,返回匹配的地标列表和新地标列表。的正确的方法中指定的函数DataAssociationFcn的属性ekfSlamObj将观测到的地标或测量值与已知的地标联系起来。数据关联函数返回关联列表和新地标列表。的正确的方法使用关联来更新车辆和地图的信念,使用观测到的地标和已知地标之间的相关性。此外,正确的方法增加任何新地标的位置和协方差状态而且StateCovariance向量,分别。
如果启用了实时绘图选项,则使用当前时间的扫描更新图形。
如果~ isempty (observedLandmarks)正确(ekfSlamObj、observedLandmarks measCovar, validationGate);更新图中车辆的修正位置如果plotOnTheRun exampleHelperUpdateScans (ekfSlamObj。状态,...ekfSlamObj。MaxAssociationRange,...observedLandmarks,...sensorHandle observationHandle);结束结束
使用drawnow用车辆的当前位置和所有已知地标及其协方差更新图形。
如果实时绘图未启用且等待栏处于活动状态,则更新执行的数据集的部分。
如果plotOnTheRun addpoints (deadRecHandle deadReckoning(计数,1),deadReckoning(统计,2));addpoints (estTrajHandle ekfSlamObj.State (1) ekfSlamObj.State (2));exampleHelperUpdateRobotAndLandmarks (ekfSlamObj.State ekfSlamObj.StateCovariance,...robotHandle、covarianceHandle landmarkHandle);drawnowlimitrate其他的%更新等待栏waitbar(数/ numSamples waitBarHandle,...sprintf (“% 2.2 f % %执行”、数/ numSamples * 100));检查单击的取消按钮如果getappdata (waitBarHandle“取消”)打破结束结束

结束
使用删除函数在所有计算完成后关闭等待栏。
如果~ plotOnTheRun删除(waitBarHandle);结束
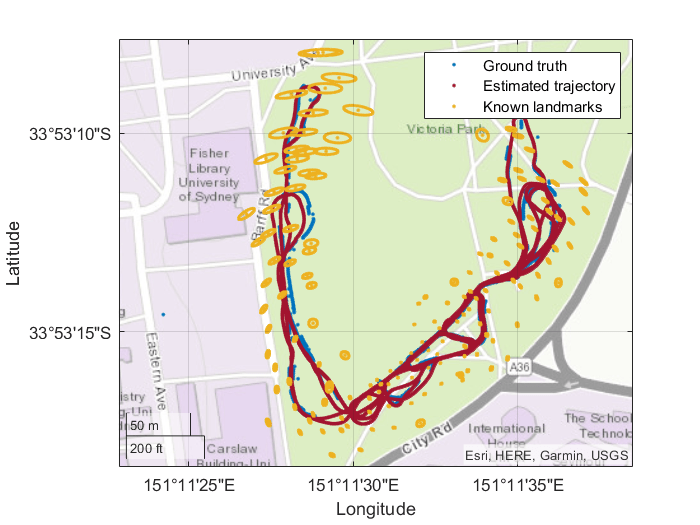
可视化地图
从GPS数据中创建一个真实的地理图。在相同的地理图上绘制车辆轨迹,以及所有检测到的地标及其相关的协方差。
得到修正和预测的姿势[corrpose, predpose] = poseHistory(ekfSlamObj);%显示地图exampleHelperShowMap (ekfSlamObj.State ekfSlamObj.StateCovariance,...gpsLatLong、corrPoses predPoses);
您也可以从以下列表中选择一个网站: