本演示详细介绍了基于飞行时间(ToF)的3D相机的距离计算算法。与其他距离图估计系统相比,许多现有的ToF相机既不能提供更高的空间分辨率,也不能提供更大的清晰范围。它们提供了可靠的深度信息,这一事实推动了它们在众多研究领域的应用。在调制光源的情况下,明确的范围取决于调制频率的值。调制频率的降低可以增加明确的范围,但也会增加测量不确定度。
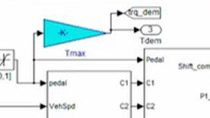
为了满足提高模糊范围的需要,用VHDL语言实现了一种扩展模糊范围的算法®和MATLAB®. 该算法使用两个调制频率来扩展明确的范围。所选的两个频率应为彼此的共质点。距离计算算法在Simulink中实现金宝app®考虑其在硬件平台上实现的可用性。该算法用VHDL语言实现。该算法也在MATLAB中用定点算法实现。两种实现都已成功测试。VHDL代码的仿真结果及其和类似测试输入的MATLAB定点实现结果的比较是有希望的。目前在Simulink中实现了相同的算法。金宝app
本课程还全面比较了三种方法:手动VHDL代码、MATLAB定点代码和Simulink模型。使用Simulink和HDL编码器可以缩短开发时间和测试时间,从而更快地实现概念验证™ 组合,尤其是图像处理算法,在FPGA系统上实现需要花费大量时间和精力金宝app。