单回路反馈/前置滤波器补偿器设计
这个例子展示了如何优化多个补偿器(反馈和预滤器)来控制一个循环使用控制系统设计。
打开模型
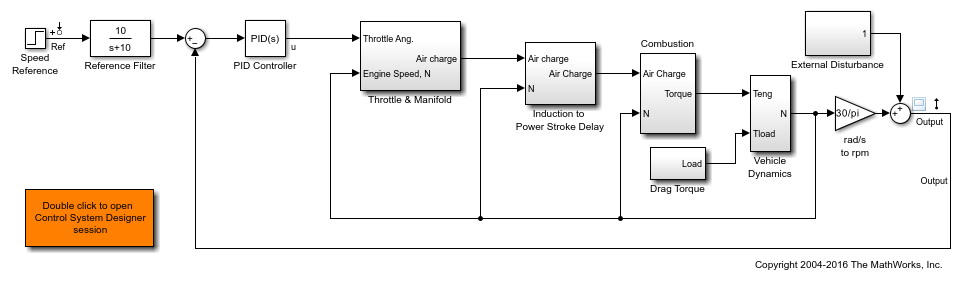
打开发动机转速控制模型,花一些时间去探索它。
open_system (“scdspeedctrl”)
设计概述
这个示例介绍了单回路控制系统的设计过程与反馈和预滤器补偿器。设计的目的是:
跟踪参考信号从一个块模型的一步金宝app
scdspeedctrl /速度参考。设计要求下的沉淀时间5秒步骤参考输入和零稳态误差。拒绝一个无边无际的输出扰动中指定子系统
scdspeedctrl /外部干扰。设计要求是减少峰值偏差190 RPM和步骤扰动输入的稳态误差为零。
在这个例子中,反馈回路的稳定性和输出的抑制干扰是通过设计PID补偿器scdspeedctrl / PID控制器。预滤器scdspeedctrl /参考滤波器是用来调整反馈系统的响应变化的参考跟踪。
开放控制系统设计师
这个示例使用控制系统设计调整反馈补偿器的系统。打开控制系统设计
启动一个预先配置的控制系统设计会议通过双击子系统模型的左下角。
配置控制系统设计使用下面的过程。
开始一个新的设计
打开控制系统设计,在仿真软件模型窗金宝app口中应用程序画廊,点击控制系统设计。
的编辑架构对话框打开时控制系统设计发射。

在编辑架构对话框,在块选项卡上,单击添加模块,并选择以下块调整:
scdspeedctrl /参考滤波器

scdspeedctrl / PID控制器

在信号选项卡,点分析仿真软件模型中定义的自动添加金宝app位置。
输入:
scdspeedctrl /速度参考输出端口1
输入
scdspeedctrl干扰/外部干扰/步骤输出端口1
输出
scdspeedctrl /速度输出输出端口1
在线性化选项选项卡,操作点下拉列表中,选择模型初始条件。
创建新的情节查看一步反应,同时优化控制器。在控制系统设计,点击新的剧情,并选择新的一步。在选择响应图下拉菜单,选择新输入输出转移反应。配置响应如下:

查看响应,点击情节。
类似地,创建一个阶跃响应图显示干扰排斥。情节对话框中,在新的一步配置响应如下:

调整补偿器
控制系统设计包含几个方法优化控制系统:
手动调整每个使用补偿器补偿器的参数编辑器。有关更多信息,请参见优化仿真软金宝app件模块使用补偿器编辑器(金宝app仿真软件控制设计)。
图形优化补偿器波兰人,0,并获得使用开/闭环预示,根轨迹,或者尼科尔斯编辑策划。点击调优方法,并选择下一个编辑器图形化优化。
优化补偿器参数使用时域和频域设计要求(需要仿真软件设计优化™软件)。金宝app点击调优方法,并选择基于优化的调优。有关更多信息,请参见执行时间和频率要求单回路控制器设计(金宝app仿真软件设计优化)。
计算初始补偿器使用自动调优参数基于闭环时间常数等参数。点击调优方法,选择PID调优,内模控制(IMC)调优,循环形成(需要鲁棒控制工具箱™软件),或LQG合成。
完成了设计
以下补偿器参数满足设计要求:
scdspeedctrl / PID控制器参数:
P = 0.0012191 = 0.0030038
scdspeedctrl /参考滤波器:
分子分母= 10 = 10 [1]
闭环系统的响应如下所示:

更新模型模型金宝app
写补偿器的参数仿真软件模型,点击金宝app更新模块。然后您可以测试您的设计的非线性模型。
bdclose (“scdspeedctrl”)