Myo SDK MATLAB墨西哥人包装
Thalmic实验室的Myo姿态控制臂环(myo.com)有一个惯性测量单元(IMU)和8个传感器表面肌电图(表)除了Windows SDK允许开发者获得访问该数据!
看看这个预览视频在YouTube上看到这个包能做什么,
https://youtu.be/pPh306IgEDo
表面上看,这个包包含了一个简化的m类,MyoMex,使MATLAB用户流数据从一个或两个Myo设备在50 hz (IMU和元数据)和200赫兹(EMG)只有1命令!注意,肌电图数据不可用在使用两台设备由于硬件/软件的局限性。
毫米= MyoMex ();%在建设、MyoMex开始积累myoData产权流数据
m = mm.myoData;%获得MyoData对象
% m的数据正在推进日志属性命名,
% quat_log, gyro_log、accel_log emg_log等等。
%数据采集是阻塞!
mm.delete ();%清理
IMU数据包括估计四元数(方向),三轴陀螺仪(角速度)和三轴加速度计(线性加速度)。
面肌电信号数据包括8原始数据通道+ Myo内置的手势检测的输出。
这里有一些东西,你会发现在这个包,
* README。txt -分步指导配置为前提
* install_myo_mex()——安装工具
* build_myo_mex ()——MEX-file构建工具
* MyoMex_Quickstart -快速入门指南脚本示例代码和自由评论
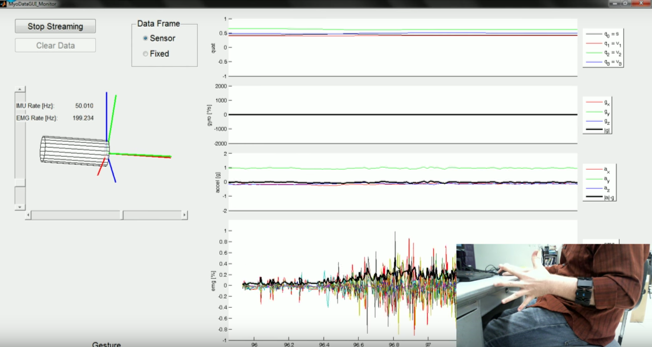
* MyoMexGUI_Monitor - GUI的实现流媒体数据与所有可用数据的可视化
新模型支金宝app持包括墨金宝app西哥人C / c++功能块和其他支持实用程序块支持两种以下配置:
*一个Myo——EMG禁用
*一个Myo——EMG启用
*两个肌EMG禁用
仿真软件金宝app的块数据输出镜数据可以从MyoData m。软实时的数据流。因此,桌面需金宝app要实时仿真软件与系统时钟同步模型。
这是被开发在一台机器上配置:MATLAB R2013a;Windows 7 64位;VS2012职业
在下面评论和速度!如果你有问题,我回答消息很快。
你也可以给我发邮件或发送信息通过我的资料在这里,
马克(在)mark-toma(点)com | marktoma (at)水牛edu(点)
我还将保持当前的GitHub上的回购,
https://github.com/mark-toma/MyoMex
有一个关于这个包的帖子Thalmic实验室的开发者论坛,
https://developer.thalmic.com/forums/topic/2940/
引用作为
马克张照片(2023)。Myo SDK MATLAB墨西哥人包装GitHub (https://github.com/mark-toma/MyoMex)。检索。
MyoConnectTest
MyoMex
MyoMex /例子
MyoMex / gui
MyoMex / myo_mex
MyoMex 金宝app/仿真软件
MyoMex 金宝app/仿真软件
版本使用GitHub缺省分支不能下载
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 3.0.0.0 | 新的仿真金宝app软件对Myo的支持!金宝app这是新的,不是很好的测试。当前的解决方案需要某种形式的软实时同步,因此,仿真软件桌面实时要求。金宝app |
|
|
| 2.5.0.0 | 修复的代码由于GitHub滥用。否则v2.4逻辑一样。 |
|
|
| 2.4.0.0 | 使用多个myo修复一堆问题 |
|
|
| 2.3.0.0 | 这是真正* * v2.3 ! |
|
|
| 2.2.0.0 | 添加链接预览视频在youtube上 |
|
|
| 2.1.0.0 | 禁用EMG当使用两个myo(硬件/软件限制);添加newDataFcn回调MyoMex MyoData;添加示例目录和一个测试脚本数据腐败。 |
|
|
| 2.0.0.0之间 | GitHub过渡后不变的标题 |
|
|
| 1.1.0.0 | 一些新特性MyoMex myo_mex(没有变化)和大量的GUI修改示例。myo_mex构建也被成功地与Visual Studio 2012专业测试。 |
||
| 1.0.0.0 | 插入两个换行。 |
你们可以合理选择联合国网站web在liste如下: