使用试验标定补偿数组不确定性
这个例子展示了如何使用试点校准改善天线阵的性能未知扰动的存在。
介绍
原则上,一个可以很容易地设计一个理想的均匀线性阵列(ULA)”执行数组处理任务如波束形成或波达方向估计。在实践中,不存在是一种理想的阵列。例如,总是会有一些不可避免的数组中不同元素间的制造公差。因为一般情况下是不可能获得准确的了解这些变化,他们通常被称为不确定性或扰动。普遍观察到的不确定性包括元素增益和相位不确定性(电气)不确定性以及元素位置的不确定性(几何不确定性)。
数组中不确定性系统的存在导致检测的快速降解,高分辨率,估计阵列处理算法的性能。因此,调整部署前的数组是至关重要的。除了上述因素外,也可能由于其他因素产生的不确定性等硬件老化和环境影响。定期校准因此也表现在所有部署系统。
有许多阵列校准算法。这个例子主要关注飞行员标定方法[1],在响应的不确定性估计数组的一个或多个已知外部资源在已知位置。这个例子比较了不确定性对阵列性能的影响前后的校准。
电子和几何建模的不确定性
考虑理想6-element齿龈沿着轴操作与半波间距和统一的逐渐减少。齿龈,可以计算预期的元素位置和蜡烛。
N = 6;designed_pos = [0 (1, N); (0: N - 1) * 0.5; 0 (1, N)];designed_taper = 1 (N, 1);
接下来,模型的扰动可能存在于一个真正的数组。这些通常是建模为随机变量。例如,假设锥度的大小和相位扰动的正态分布随机变量标准差为0.1和0.05,分别。
rng (2014);锥形= (designed_taper + 0.1 * randn (N - 1))。* exp (1 * 0.05 * randn (N - 1));
下图显示了不同的大小和相位摄动锥,锥设计。
helperCompareArrayProperties (“锥”、锥度、designed_taper…{“摄动数组”,“设计数组”});

扰动传感器位置的x, y, z方向生成类似的标准偏差为0.05。
pos = designed_pos + 0.05 * randn (N);
下图显示了摄动数组的元素的位置和理想的数组。
helperCompareArrayProperties (“位置”、pos、designed_pos…{“摄动数组”,“设计数组”});

阵列扰动的影响
前一节中显示了设计的区别,理想的数组和真正的,不安的数组。因为这些错误,如果一个人盲目地应用处理步骤,如波束形成的权值,计算设计使用数组,数组摄动,性能将显著下降。
考虑的情况下淋巴细胞脉络丛脑膜炎病毒beamformer旨在引导10度的理想阵列方向方位和两个干扰从两个方向-10度方位和60度方位。我们的目标是保护感兴趣的信号,同时抑制干扰。
如果数组的精确知识的锥度和几何,波束形成的权值可以计算如下:
%生成10 k样本目标和干扰30 db信噪比阿兹= (-10 10 60);Nsamp = 1 e4;ncov = db2pow (-30);[~,~,rx_cov] = sensorsig (pos、Nsamp az, ncov“锥”、锥形);%计算淋巴细胞脉络丛脑膜炎病毒波束形成加权假设阵列设计sv = steervec (pos、az);w = lcmvweights (bsxfun (@times、锥度、sv) (0, 1, 0), rx_cov);
然而,由于该数组包含未知扰动,波束形成的权值必须计算基于数组的位置和锥度设计。
designed_sv = steervec (designed_pos, az);designed_w = lcmvweights (bsxfun (@times, designed_taper designed_sv),…(0,1,0),rx_cov);
下图比较预期的光束模式与模式导致应用摄动的设计权重数组。
helperCompareBeamPattern (pos、锥度、w、designed_w 90:90, az,…{“预期模式”,“未校准模式”},…“梁模式之前校准”);

从策划模式,很明显,产生的模式未校准的权重不满足要求。它把一个空所需的10度左右方位方向。这意味着不再能被检索所需的信号。幸运的是,阵列校准可以帮助恢复模式。
飞行员校准
有许多算法可用来执行阵列校准。一类常用的算法是飞行员校准。算法设置几个来源已知的方向,然后使用数组来接收信号与发射机。在已知的方向,因为这些发射器是预期的理想的阵列接收信号可以计算。比较这些与实际收到信号,有可能得出的差异由于不确定性和改正。
下面的代码显示了阵列校准的过程。首先,飞行员来源需要在不同的方向选择。请注意,飞行员的数量决定多少不确定性算法可以正确的来源。在这个例子中,正确的传感器位置的不确定性和锥度不确定性,至少四个外部资源是必需的。如果使用多个数据源,估计将会改善。
pilot_ang = [-60、5、5、40;-10年,0,0,30);
四个试点来源位于以下方位角和仰角对:(-60、-10),(5,0)、(5,0)、(40岁,30)。接收到的信号从这些飞行员可以模拟
为m =大小(pilot_ang 2): 1:1 calib_sig(:,:,米)= sensorsig (pos、Nsamp pilot_ang(:,米),…ncov,“锥”、锥形);结束
利用阵列接收到的信号从飞行员,连同设计数组的元素位置和蜡烛,校准算法[1]估计摄动数组的元素位置和蜡烛。
[est_pos, est_taper] = pilotcalib (designed_pos,…calib_sig、pilot_ang designed_taper);
一旦估计位置和锥度,这些可以使用的设计参数在计算beamformer权重数组。这个结果数组中模式由下面的红线。
corrected_w = lcmvweights (bsxfun (@times est_taper,…steervec (est_pos az)), (0, 1, 0), rx_cov);helperCompareBeamPattern (pos、锥度、…w corrected_w 90:90、阿兹…{“预期模式”,“校准模式”},…“梁模式经过校准的);
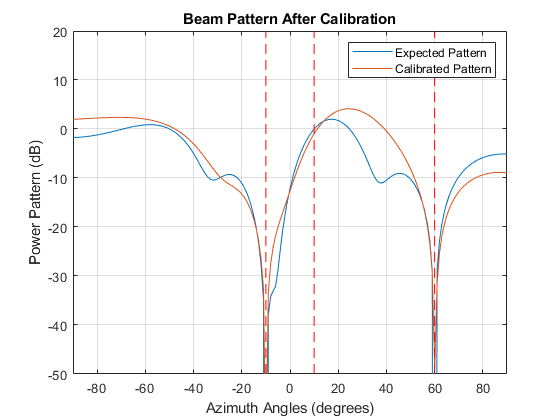
上图显示,产生的模式校准数组比未校准的一个数组。特别是,现在保存信号所需的方向。
总结
这个例子展示了如何数组可以影响其响应模式的不确定性,进而降低阵列的性能。示例还说明飞行员校准可用于帮助恢复阵列的性能。
引用
[1]n Fistas和A . Manikas“一系列新的通用全球标定方法”,IEEE ICASSP学报》,第四卷,第76 - 73页,1994年4月。