DC1 -两象限单相整流器5马力直流驱动与再生制动系统
本例展示了带再生制动系统的两象限单相整流直流驱动器。
C.Semaille Louis-A。设计(蒙特利尔高等技术学院)
描述
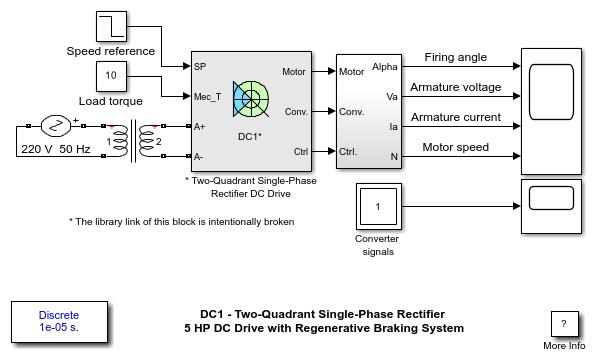
该电路基于专用电源系统的DC1块。它的模型为一个5 HP直流电机的两象限单相整流驱动器。一个制动单元块已添加,以模拟再生制动(象限IV操作模式)。
5hp直流电机由恒定的150v直流场电压源单独激励。电枢电压由单相整流器提供,由两个PI调节器控制。整流器由一个220v AC 50hz电压源供电,然后由一个线性变压器将电压提升到一个足够的值。
调节器控制整流晶闸管的发射角度。第一个调节器是速度调节器,其次是电流调节器。调速调节器输出电流控制器使用的电枢电流参考(单位:p.u),以获得达到所需速度所需的电磁转矩。速度参考变化率遵循加速和减速斜坡,以避免突然的参考变化,可能导致电枢过流和系统不稳定。电流调节器通过计算适当的可控硅发射角度来控制电枢电流。这就产生了获得所需电枢电流所需的整流输出电压。
制动单元块由具有两种状态(正常工作模式和制动工作模式)的有限状态机管理。当系统在制动模式下通过时,电枢开关被激活,并允许电枢电流流反转。这产生一个反向电磁制动扭矩快速减速。当流过开关的电枢电流等于0a时,电流流的反转被启动。这样可以避免在换向过程中开关产生破坏性电弧。
一个150 mH平滑电感与电枢电路串联以减少电流振荡。
模拟
开始模拟。可以在瞄准镜上观察电机电压、电流、速度和整流器发射角度。速度和电流参考也显示。
初始转速参考设置为800rpm。负载转矩为10 N.m。观察电机转速准确地跟随加速度参考斜坡(+350 rpm/s),大约3.5 s后达到稳定状态。电枢电流很好地跟随参考电流并保持在标称电流以下。在这一阶段,平均发射角度值保持在90度以下,晶闸管桥处于整流模式(第一象限工作模式)。
在t = 4秒时,速度基准下降到200 rpm,系统在制动模式下通过。当电枢电流达到0 A时,电枢开关被激活,通过电机的电流发生逆转(通过电桥的电流方向当然不变)。再次观察,电机速度跟随减速斜坡想要的。减速斜坡已设置为高值(-1250 rpm/s),以清楚地显示制动电磁转矩的影响。在这段时间内,电桥工作在逆变模式(第二象限工作模式)。
在t = 4.5 s时,电机转速略低于转速参考值,通过电机的电枢电流反向恢复正常。桥在整流模式下工作,电机转速在t = 5.5秒左右达到200转/分。
注意换向时的电流超调。这是由于电枢开关引起的电桥输出电压突然反转。电桥输出电压不能立即跟随此电压反转。电桥和电机之间的突然电压差产生电流超调。但是,超调峰值合理,不会损坏。
笔记
1)电力系统以10us的时间步长离散化。控制系统(调节器和制动单元)使用100 us的时间步长来模拟微控制器控制设备。
2)为了减少作用域内存中存储的点的数量,使用了20的抽取因子。
您也可以从以下列表中选择一个网站: