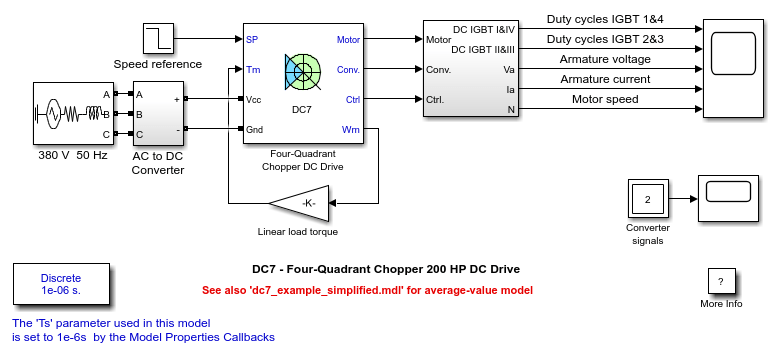
DC7 -四象限斩波器200惠普直流驱动
这个例子显示了DC7四象限斩波器在调速直流驱动。
C。Semaille Louis-A。蒙特利尔Dessaint(高等技术师范学院)
描述
200年惠普直流电机与一个常数150 V直流他励电压源。电枢电压是由一个IGBT变频器控制的2π监管机构。由515 V直流总线转换器是美联储通过整改的380 V交流50 Hz电压源。为了限制直流总线电压在动态制动模式,添加了一个制动斩波器在二极管整流器和DC7块。
第一个监管机构是一个速度调节器,电流调节器。速度调节器输出电枢电流参考电流控制器使用的(p.u。)为了获得所需的电磁转矩达到所需的速度。参考速度变化率是为了避免突然加速和减速坡道参考变化,可能会导致电枢过电流和破坏系统。电流调节器控制电枢电流的计算相应的责任比例5 kHz的四个IGBT脉冲设备(脉冲宽度调制)。适当的系统行为,IGBT器件的瞬时脉冲值1和4是相反的IGBT设备2和3。由此产生的平均电枢电压需要获得所需的电枢电流。为了限制电流振荡的振幅,滤波电感是放置在与电枢电路系列。
模拟
在开始仿真之前,设置初始总线电压515 V通过GUI块(“初始状态设置”按钮和“cbu”变量)。
开始仿真。你可以观察电机电枢电压和电流,四个IGBT脉冲和电动机转速范围。电流和速度也显示引用。
电机耦合线性负载,这意味着的机械转矩负载速度成正比。
参考速度设置在500 rpm t = 0。观察到电动机转速跟随参考坡道准确(+ 400转/秒)和达到稳定状态在t = 1.3 s。
电枢电流跟随当前参考很好,与快速响应时间和小涟漪。注意到当前的脉动频率是5 kHz。
在t = 2 s,下降到每分钟-1184转的速度参考。当前参考减少减少电磁转矩,使电机减速的帮助下负载转矩。
在t = 2.2 s,当前反转,以产生一个制动电磁转矩(动态制动模式)。这将导致直流总线电压增加。
在t = 3.25 s,汽车到达0转速和负载转矩改变和变得消极。现在的负电流产生电磁转矩,使电机加速遵循负速度坡道(-400转/秒)。在t = 6.3秒,速度达到-1184 rpm和稳定的参考。
笔记
1)电力系统与1离散时间步。的速度和电流控制器使用100和20我们取样时间分别以模拟单片机控制装置。
2)为了减少点作用域内存中存储,使用的是大批杀害25倍。一些转换可能并没有出现在范围上。查看详细的仿真结果,减少大量毁灭因素1。
3)使用一个平均值模型的一个简化版本转换器可以通过选择“平均”的“模型详细级别”菜单的图形用户界面。时间步可以增加了最小控制系统采样时间价值。可以通过输入' Ts = 20 e-6在工作区中对于这个例子。参见dc7_example_simplified模型。