使用可变的直流链接六步逆变器对无刷直流电动机驱动器的速度调节
This example demonstrates the speed regulation of a brushless DC (BLDC) motor drive using a variable DC link six-step inverter.

描述
In its basic form, BLDC motors consist of a trapezoidal back-EMF permanent magnet synchronous motor fed by a three-phase inverter. A position sensor attached to the rotor provides the position signals required to synchronize the stator currents with the back-EMFs so that the motor operates as a synchronous motor at all times. Because the voltage magnitude is proportional to the motor speed, the speed can then be regulated by varying the DC link voltage connected to the three-phase inverter.
电气模型
DC/DC转换器由理想的DC源馈电,其输出过滤器允许您更改直流链路电压。DC总线连接到三相,两级转换器。该转换器生成适当的三相电压,用于300 W,4000 RPM BLDC电动机的操作。
Control System
控制系统的主要组成部分是:
Speed Regulator — The regulator compares the actual motor speed to the speed reference and generates the DC voltage reference.
电压调节器 - 测量的直流链路电压与参考值进行了比较。结果误差被送入抗弹药PI调节器。为了纠正误差,调节器向DC-DC转换器输出所需的占空比(D)值。
换向序列和脉冲产生 - 因为背面EMF为梯形形式(平坦面积为120o),因此如果在背面EMF也恒定时,当电流保持恒定时,则最低纹波的最大扭矩会产生最低的旋转扭矩。这种条件意味着一次只进行两个阶段进行的逆变器的六步操作。基于转子位置(从霍尔效应传感器获得)和电动机旋转方向,该块会生成适当的脉冲,向供电电机的三相逆变器产生适当的脉冲。
该表列出了电动机逆时针旋转的六个可能的换向序列:

This figure shows two commutation sequences for the counterclockwise rotation of the motor.
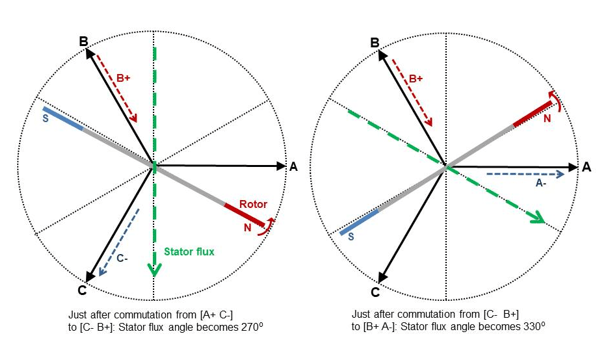
为了正确操作BLDC电动机,必须保持定子和转子通量之间的角度接近90°。通过六步控制,电动机总共具有六个可能的定子通量向量。定子通量矢量必须在特定转子位置更改。但是,使用六步控制技术,无法将转子通量和定子通量之间的角度保持在90°之间。实际角度从60°到120°不等。
For the [C- B+] sequence, you can verify from the left image in the diagram that the position of the rotor north pole varies from 60° to 120° ahead of the stator north pole, with repulsion between poles of same polarity producing a counterclockwise rotation. At the same time, the position of the rotor south pole varies from 120° to 60° behind the stator north pole, with attraction between two opposite poles still producing counterclockwise rotation.
Simulation
运行仿真并观察范围1上的波形。最初,电动机以4000 rpm旋转而无需负载。
在0.1 s时,将0.6 N.M的载荷扭矩施加到电动机上。控制系统增加了直流链路电压参考,以将电动机速度保持在4000 rpm。
在0.25秒,速度参考值是减少到1000rpm. The control system significantly decreases the DC link voltage reference in order to respect the new speed reference. Notice the reduced frequency of the motor phase currents.
在范围2上,您可以观察到DC调节器输出(D)以及DC链路电压变化。
实时模拟
如果您具有Simulin金宝appk实时和Speedgoat目标计算机,则可以实时运行此型号。
Open the Configuration Parameters window (or pressctrl+e), 点击代码生成, and set系统目标文件至
slrealtime.tlc。连接到目标,在即时的选项卡,单击在目标上运行。
然后,您的模型将自动在目标上自动构建,部署和执行。根据目标流带宽的不同,您可能必须将实时传输的信号数量从目标实时传输到主机计算机。
References
Musil,J。使用变量DC链接六步逆变器的3阶BLDC驱动器。Freescale Czech Systems Laboratories. 2006.
也可以看看
电动机控制(第1部分):无刷直流电动机的简介,梅尔达·乌洛索(Melda Ulusoy),数学//www.tatmou.com/金宝appsupport/search.html/videos/brushless/brushless-dc-motors-introduction-1564728874059.html?
您还可以从以下列表中选择一个网站:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)