使用Simulink函数设计切换控制器金宝app
该模型显示了如何通过组合StateFlow®和Simulink®函数的功率来设计切换控制器。金宝app

状态流图SwitchingController实现一个简单的开关控制器,该控制器在三个状态之间进行切换:稳定的,,,,p和pid。何时在稳定的状态,我们产生零控制输出。何时在p或者pid,我们委派Simulink函数呼叫金宝app子系统,以计算所需的控制工作。
这创建用于监视的数据国家选项pid被检查。因此,除了控制输出你,状态流图还产生与状态相同名称的记录输出pid。
从p至pid基于错误足够低[e pid_tresh是模型工作空间中定义的变量,值为0.3。

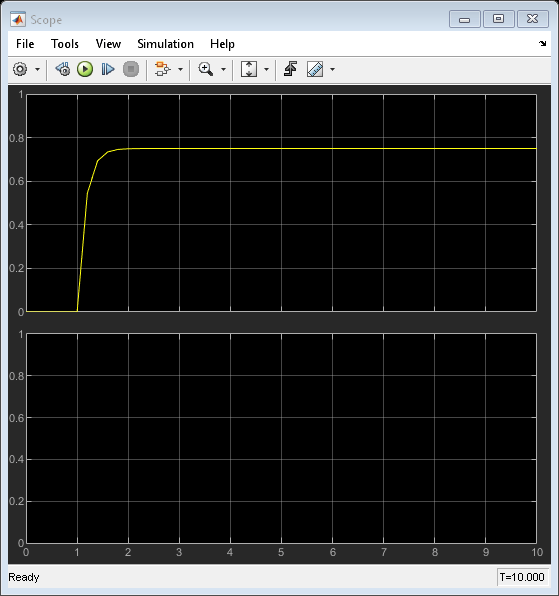
Simu金宝applink子系统SwitchingController/p.p_control实现非常简单的比例控制,增益为3。如果我们继续留在州p,闭环系统的稳态增益为3/4 = 0.75。因此,我们将获得0.25的错误。

Simu金宝applink子系统switchingcontroller/pid.pid_control实施简单的PID控制策略。比例收益与p从而确保控制工作的平稳过渡。

当我们模拟模型时,我们会注意到稳态误差接近零。

在没有PID控制的情况下,我们的稳态误差为0.25。如果我们改变pid_tresh到0.1,我们将绝不到达pid,因为只要我们处于状态,错误就永远不会低于0.25p。
相关话题
您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)