费斯托发展创新的机械臂使用基于模型的设计
挑战
解决方案
结果
- 复杂的PLC实现自动化
- 技术和创新奖项赢了
- 新的商业机会
“使用仿真软件金宝app对基于模型的设计使我们能够开发所需的复杂的气动控制仿生处理助理和其他机械电子设计。用仿真软件金宝appPLC编码器,现在更容易从设计到产品。”
费斯托Rudiger纽曼博士
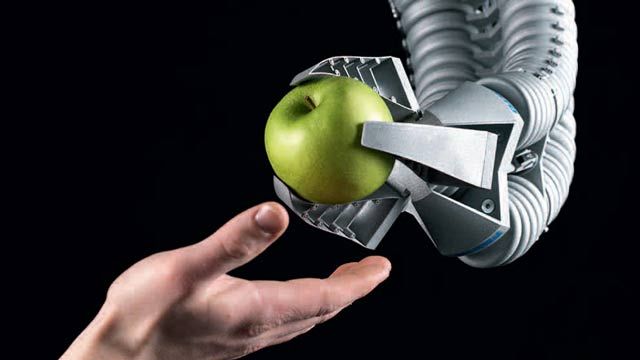
运动的启发,大象的鼻子,费斯托公司开发出仿生处理助理,机械臂,可密切合作,与人类安全。与工业机械手臂,这通常是封闭保护附近的工人在安全的笼子里,仿生处理助理设计与人类直接交互。偶然接触机械电子手臂是无害的,因为手臂是由轻质聚合物组件由压缩空气驱动的。同时,充气轮胎是由一个控制系统,收益率立即在发生碰撞。
费斯托研究者使用MATLAB开发了控制系统®和仿真软金宝app件®基于模型的设计,然后在可编程逻辑控制器(PLC)实现使用仿真软件PLC编码器™。金宝app“基于模型的设计,我们可以模型、模拟、优化,并生成代码来实现控制器相同的工具环境,“Rudiger纽曼博士说,费斯托的机电整合系统的研究部门主管。“因此,我们的开发过程更高效,不仅对仿生处理助理,但对于任何项目,需要与代码生成一个控制器实现。”
挑战
有11个自由度,仿生处理12个气室助理是一个复杂的系统,13个致动器,和12个位置传感器。系统的12个压力控制器和12个位置控制器协同工作来控制手臂的运动,重约4磅(1.8公斤),延伸到3.6英尺(1.1米)。“气动系统是高度非线性和树干有弹性,所以我们不能用简单的PID控制器,”纽曼说。“为了得到最优控制器响应,我们需要主动减振和专门的非线性状态空间模型,反馈和前馈控制结构。”
费斯托的研究和开发团队经常被要求评估专业客户应用程序的可行性。他们传统上对这些应用程序原型开发和测试控制器硬件。创建一个微控制器的解决方案的过程这样一个原型,然而,耗时和昂贵。“我们想使用标准费斯托的PLC产品实时控制没有构建新的硬件容量特殊控制器应用程序,”纽下载188bet金宝搏曼说。
解决方案
费斯托利用仿真软件开发出仿生处理助理控制器,实现结构化文本费斯托PLC使用仿真软件PLC编码器。金宝app
研究人员制造了植物和控制器模型仿真软件对个人气室的仿生处理助理,和运行模拟来验证控制器的功能。金宝app
他们从模型中生成的C代码使用仿真软件编码器金宝app™。他们这段代码编译和部署原型硬件进行最初的实验室测试。
在MATLAB中,研究者使用测量系统识别执行期间收集的实验室测试气动手臂提炼工厂模型。
有了更准确的植物模型,仿真软件的团队优化控制器设计,以改善其性能和稳定性。金宝app
然后使用仿真软件PLC编码器生金宝app成IEC 61131结构化文本从控制器的优化仿真软件模型。结构化文本导入后3聪明,软件解决方案CoDeSys IDE,团队编译和部署到CMXR-C2费斯托的多轴控制器。金宝搏官方网站
验证PLC实现,他们比较其频率响应和时间响应的仿真软件模型和控制器的初始原型的C代码。金宝app他们执行额外的迭代来提高性能调优模型与仿真软件PLC仿真软件和再生结构化文本编码。金宝app
仿生处理助理已经证明在世界范围内赢得了创新奖项在欧洲和北美。费斯托是现在使用仿真软件PLC编码器开金宝app发其他先进的机电整合系统。
结果
复杂的PLC实现自动化。“在以前的项目中,我们有手工编写结构化文本了前馈控制,但它太复杂,实现反馈控制的仿生处理助理在PLC使用本手册我们根本就不会做,”纽曼说。“金宝app仿真软件PLC编码器使我们能够在几分钟内自动生成结构化的文本。”
技术和创新奖项赢了。为其开发仿生处理助理工作,使安全机器人和人类之间的相互作用,费斯托被授予250000欧元的德国Zukunftspreis,德国总统奖的技术和创新认识的进步,为人类服务,改善生活,创造就业机会。
新的商业机会。“在过去,它是昂贵构建所需的控制器硬件专业产品,”纽曼指出。下载188bet金宝搏用仿真软件P金宝appLC编码器”,我们可以很容易地在我们现有的PLC硬件上实现控制器的设计。这种能力使得费斯托寻求新的商机工程容量控制器产品。”下载188bet金宝搏
下载188bet金宝搏产品使用
展示你的成功
加入客户参考程序