雷达系统仿真中射频前端的建模
在雷达系统中,射频前端通常在定义系统性能方面起着重要作用。例如,由于射频前端是接收机链的第一部分,因此其低噪声放大器的设计对于实现所需的信噪比(SNR)至关重要。此示例显示如何将射频前端行为纳入现有雷达系统设计中。
此示例需要RF块集™.
可用的示例实现
此示例包括两个Simulink®模型:金宝app
具有一个目标的单站雷达:slexMonostaticRadarRFExample.slx
FMCW雷达距离和速度估计:slexFMCWRFExample.slx
介绍
几个例子,例如在Simulink中模拟雷达接收机的测试信号金宝app和采用FMCW和MFSK技术的汽车自适应巡航控制(雷达工具箱)已经证明,可以使用相控阵系统工具箱在Simulink中构建端到端雷达系统。在许多情况下,一旦建立了系统模型,下一步可金宝app能是在不同组件中添加更高的保真度。射频前端是此类组件的热门候选组件。在Simulink中建模系统的一个优势是执行多域模拟。
以下各节显示了在使用相控阵系统工具箱构建的雷达系统中整合RF块集建模功能的两个示例。
单站单目标雷达
第一个模型改编自示例在Simulink中模拟雷达接收机的测试信号金宝app它模拟了一个带有一个目标的单站脉冲雷达。从图表本身来看,下面的模型与该示例中显示的模型相同。
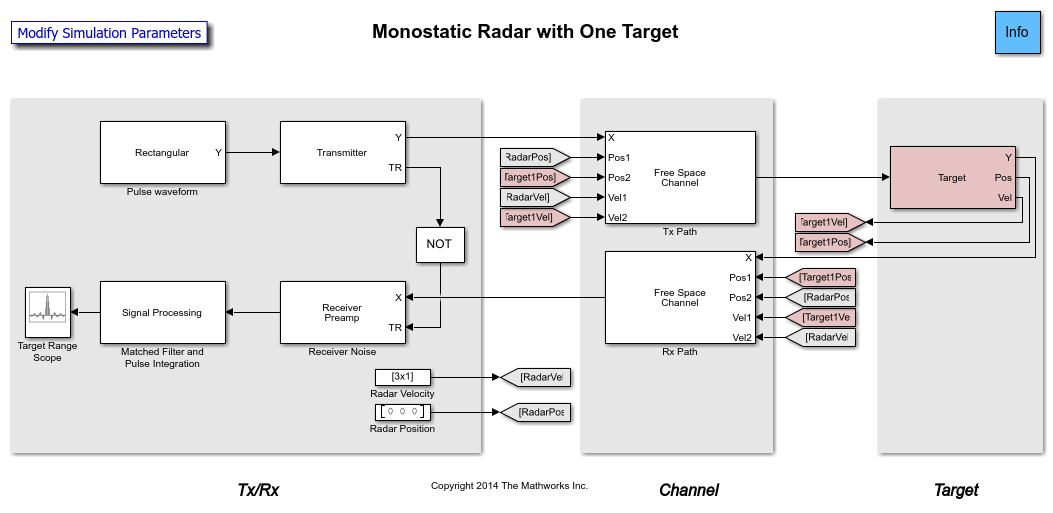
当模型被执行时,结果图也是相同的。

然而,对发射机子系统的深入研究表明,现在发射机由来自RF区块集的功率放大器建模。
警告:无法识别的函数或变量“CloneDetectionUI.internal.CloneDetectionPerspective.register”。

在接收器端也实现了类似的更改。

有了这些变化,该模型就能够模拟射频行为。例如,上面所示的仿真结果假设一个完美的功率放大器。在实际应用中,放大器会遇到许多非线性问题。如果将发射机的IP3设置为70db,并再次运行模拟,目标对应的峰值不再占主导地位。这给了工程师一些关于系统在不同情况下的性能的知识。

FMCW雷达距离和速度估计
第二个例子改编自采用FMCW和MFSK技术的汽车自适应巡航控制(雷达工具箱)但是,该模型使用三角形扫描波形,因此系统可以同时估计距离和速度。在顶层,该模型类似于从相控阵系统工具箱中构建的模型。一旦执行,该模型将显示与目标车辆的距离和相对速度相匹配的估计距离和速度值。

然而,与第一个例子类似,发射机和接收机子系统现在是用RF Blockset块构建的。
下图显示了变送器子系统。
警告:无法识别的函数或变量“CloneDetectionUI.internal.CloneDetectionPerspective.register”。

下图显示了接收器子系统。

在连续波雷达系统中,发射波形的一部分用作参考,以消除接收到的目标回波。从上图中可以看出,发射波形通过耦合器发送到接收机,并通过I/Q解调器进行消除。因此,通过调整这些射频组件中的参数,可以实现高分辨率的接收可以实现er模拟逼真度。
总结
此示例显示了最初使用相控阵系统工具箱构建的两个雷达模型,后来合并了RF Blockset的RF模型。将这两个产品结合在一起,大大提高了仿真逼真度。下载188bet金宝搏
您还可以从以下列表中选择网站:
