pidTuner
开放PID调节器PID调优
语法
pidTuner (sys、类型)
pidTuner (sys Cbase)
pidTuner(系统)
pidTuner
描述
pidTuner (启动PID调谐器应用和设计的控制器类型sys,类型)类型对植物sys。
pidTuner (启动与基线控制器PID调谐器sys,Cbase)Cbase这样你就可以比较性能和设计控制器之间的基线控制器。如果Cbase是一个pid,pidstd,pid2或pidstd2控制器对象,PID调谐器设计一个控制器相同的形式、类型和离散积分公式Cbase。
pidTuner (设计一个平行形式PI控制器。sys)
pidTuner发射PID调谐器默认的1和1的比例(P)控制器。
输入参数
|
植物模型的控制器设计。 如果工厂不稳定极点,
然后你必须指定的数量不稳定的波兰人在植物。要做到这一点,打开后PID调谐器,植物菜单中,选择 |
|
控制器的类型控制器设计、指定为一个特征向量。这个词控制器类型是指哪些术语存在控制器动作。例如,一个比例积分控制器只有一个比例和积分项,而PIDF控制器包含比例,积分器,过滤导数项。 1-DOF控制器
二自由度控制器
二自由度PID控制器一般的更多信息,请参阅二自由度PID控制器。 与定值权重二自由度控制器
关于fixed-setpoint-weight二自由度PID控制器的更详细的信息,明白了为优化PID控制器类型。 控制器形式当你使用 如果
|
|
代表一个基线控制器动态系统,允许比较的性能设计的控制器的性能 如果 如果 |
例子
交互式平行形式控制器的PID调优
发射PID调谐器设计一个平行形式PIDF控制器离散时间工厂:
Gc = zpk ([] (1 1 1) 1);Gd =汇集(Gc, 0.1);%创建离散时间工厂pidTuner (Gd pidf) %发射PID调谐器
交互式PID调优的标准形式控制器使用积分离散化方法
设计一个标准形式PIDF控制器使用BackwardEuler离散积分公式:
Gc = zpk ([] (1 1 1) 1);Gd =汇集(Gc, 0.1);% %创建基线控制器创建离散时间工厂。Cbase = pidstd (1、2、3、4、Ts, 0.1,……“IFormula”、“BackwardEuler’,‘DFormula’,‘BackwardEuler’) pidTuner (Gd Cbase) %发射PID调谐器
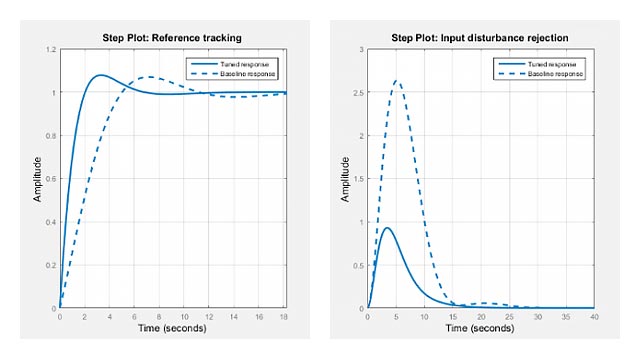
PID调谐器设计一个控制器Gd拥有相同的形式、类型和离散积分公式Cbase。相比之下,您可以显示块的响应Cbase的响应情节设计控制器通过单击显示基线在PID调谐器复选框。
提示
如果
类型或Cbase指定一个自由度(1-DOF) PID控制器,然后pidTuner设计一个控制器单元反馈回路的说明:
如果
类型或Cbase指定了两个自由度的二自由度PID控制器,然后pidTuner设计一个二自由度控制器的反馈回路的说明:
PID调谐器有一个默认的目标阶段的60度和自动曲调PID收益平衡性能(响应时间)和鲁棒性(稳定的利润)。使用响应时间或带宽和阶段保证金滑块调整控制器的性能需求。通常提高性能鲁棒性降低,反之亦然。
选择响应的情节响应菜单分析控制器的性能。
如果您提供
Cbase,请检查显示基线显示基线控制器的响应。有关使用PID调谐器的更详细的信息,明白了设计PID控制器与PID调谐器。


交互式实时编辑器中的PID调优,请参阅调整PID控制器住编辑任务。这个任务可以交互式地设计PID控制器,并自动生成MATLAB®您的生活脚本代码。
算法
MathWorks信息®PID调节算法,明白了PID优化算法。
选择
从MATLAB桌面,您可以打开PID调谐器应用程序选项卡。当你这样做的时候,使用植物菜单在PID调谐器指定工厂模型。
PID调优在命令行中使用pidtune。的pidtune命令可以为多个植物设计一个控制器。
交互式实时编辑器中的PID调优,请参阅调整PID控制器住编辑任务。这个任务可以交互式地设计一个PID控制器和MATLAB代码自动生成脚本。
引用
Astrom, k . j .和Hagglund T。先进的PID控制研究三角园,NC:仪器仪表、系统和自动化的社会,2006年。