自动驾驶的工具箱
苯丙嗪、拟唑嗪对自主神经细胞有抑制作用

自动驾驶工具箱™为我们提供了一种算法和工具,可以测试我们的自动驾驶能力。È可能的方案是验证sistemi di percezione di visionone, così come algoritmi di sensor fusion, di pianificazione dei percorsi o i controllori del veicolo。鸟瞰图包括鸟瞰图,鸟瞰图,鸟瞰图,鸟瞰图,鸟瞰图,鸟瞰图等。我的工具箱可以在这里输入和下载高清实时地图,可以在OpenDRIVE下载®.
应用地面真相标签,è可能自动验证(地面真相)每一个adress e valoritmi di percezione。硬件在环(HIL)模拟桌面仿真,传感器融合,计算机仿真和控制逻辑,è可能的通用模拟场景。È可能的模拟输出在一个环境3D fotorealtio e rileventi dei sensori di oggetti e dei limiti carreggiata在一个环境di simulazione 2.5-D。
自动驾驶工具箱用于自动、压缩、AEB、ACC、LKA等功能的应用。我的工具箱支持C/ c金宝app++为原始的rapida e Il测试HIL,可协助算法的融合,听觉,听觉,听觉控制和veicolo。
Inizia奥拉:


你可以把所有的东西都给我,我可以把所有的东西都给我。
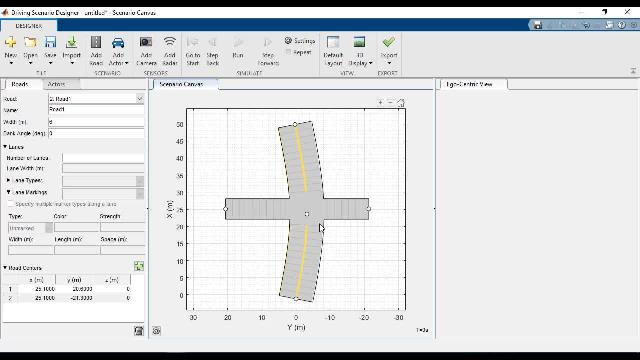
二guida立方
在一个立方体的模拟环境中,我们可以对雷达和相机的感知模型进行一系列的模拟。确定驾驶场景设计器的设计方法。进口欧洲NCAP检测。
Simulazione di uno scenario di guida con虚幻引擎
Sviluppo,在一个环境的3D模拟和虚幻渲染引擎中测试视觉化算法和预定位®di史诗般的游戏®.

在不同的场景下,使用一个三维模拟环境。
自动化的
应用Ground Truth Labeler在交互式和自动化的基础上,对场景的分类语义进行分割。
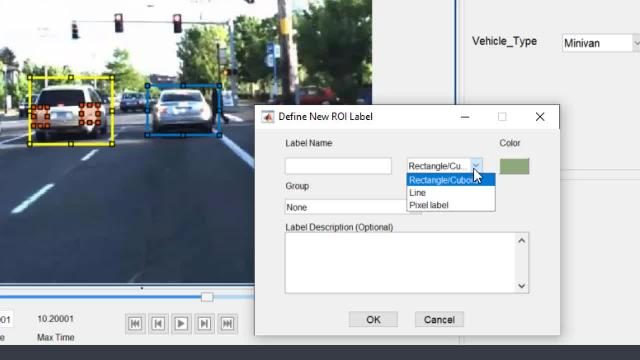

在南坎波省的一个基地里,有一个输出的价值。

输出与单镜头摄像传感器相同。

我们可以使用激光雷达。

可视化实现传感器融合。
Accedere ai dati di HERE HD Live Map
这是一份高清实时地图,在这张地图上我们可以看到更多的内容。

利用这里的高清实时地图每验证配置della carreggiata。
把这个映射形象化
利用坐标流每个mappare la posizione dei veicoli在movimento。

可视化在流中的数据映射。

在一个环境的3D中可视化。

第guida场景中的Retromarcia:
同样地,我们也可以在marcia后进行parcheggio
Strade开放地图:
我们可以使用OpenStreetMap的web服务
Esportazione OpenDRIVE:
条件之一,我们可以使用这种格式
Esempi di localizzazione:
在虚拟引擎的模拟下,根据导航进行视觉激光雷达定位®
Blocco仿真3D视觉检测发生器:
我们可以使用虚拟引擎进行模拟
需要咨询勒注意di rilascio根据我们的推测,我们可能会对记者的行为进行调查。