在这个视频中,我们将看到如何自动调整控制器循环上涨电机控制应用程序使用面向领域自动调谐块控制。
在这里的闭环仿真模型中,我们工厂模型,包含电机和逆变器模型块。然后我们有内部dq轴电流PI控制器循环和外循环速度PI控制器。
在传统优化方法你必须手动调整一个循环,这往往是困难和耗时的过程。
磁场定向控制自动调谐简化并加速了这个过程通过自动调优d q轴电流和速度环的应用程序基于您所指定的带宽和相位裕度为每一个循环。可以使用此块在桌面模拟矢量控制器优化收益。
从本质上讲,它运行自动调谐实验的每个循环注入扰动;记录输出;评估工厂的频率响应和调整PI控制器参数。
让我们看看这个模型被设置为自动微调获得使用磁场定向控制自动调谐块。
首先,我们建立了电机速度参考资料。我们将让汽车加大它的速度达到稳定状态的使用最初的控制器增长约2500 rpm。然后我们参考速度提高到每分钟4500转,后跟一个反向旋转的方向4000 RPM,看看控制器执行最初。然后我们将恢复电动机转速在2500 RPM回到稳定状态,使用磁场定向控制自动调谐块运行那些autotuning实验内部dq当前循环,然后外速度环。块调整后的收益,我们将运行相同的瞬变的电动机转速参考和检查与调整控制器的性能收益。
与速度参考概要集,我们将设置磁场定向控制自动调谐块和裁缝autotuning实验设置。
最初的π收益控制回路在这里设置使用数据存储内存块和磁场定向控制自动调谐块设置在这个子系统FOC_AutoTuner命名。这个街区的子系统,输出电流和速度循环扰动和措施产生的控制器输出,电机电流和速度优化收益。
调整自动调谐实验设置,我们将看看磁场定向控制Autotuner块的块对话框。
在参数下,我们看到的循环调整。我们没有一个通量循环,我们不这样。我们有这个选项检查使用相同的dq轴电流回路的设置。
优化选项卡下,设控制器要求dq-axis当前循环。这些循环,我们将设置一个目标的带宽3000 rad /秒阶段保证金为80度。
外循环速度会慢至少10倍比当前的循环,所以我们将把100 rad / s的带宽。我们设定了一个目标阶段60度。
实验选项卡让我们选择的振幅扰动被注入和实验的持续时间。基于我们之前设置的速度参考资料,我们将设置一个实验开始时间6秒的持续时间0.5秒D-axis电流环。同样让我们开始第二个实验的Q轴7秒,允许足够的时间从第一个实验瞬变消失。期间,再次设置0.5秒。循环的速度,让我们设置开始8秒,持续时间3秒。
现在在循环实验设置,当前循环的植物类型与一个积极的迹象是稳定的。这里的正弦扰动将代表vd的扰动和矢量量化。我们将设置一个归一化值为0.15。没有科学选择这个值。它必须足够小,不改变电动机的操作点和足够大的激励汽车动力学。再次循环速度,植物类型和信号分别是稳定的和积极的。这个循环将扰动的扰动智商参考当前我们将正弦振幅归一化值为0.1。
块选项卡下,我们选择了自动调谐过程的启动/停止输出实验,这将使我们能够更新π每次实验后收益。最后,整个控制运行在单精度数据类型我们将匹配。然后单击ok
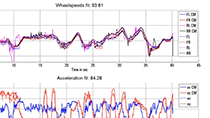
现在一切都设置好了,我们可以运行模型。实验和现场运行面向控制自动调谐块将更新所有3循环的循环收益。让我们去看看控制器性能发生了变化
最初的控制器增长,我们看到了运动反应时跟踪参考速度很慢,重要的过度和有一个很大的沉淀时间。然后三个实验的电流和速度之间的循环运行6和11秒,微调的收益。这些成果是π块自动更新。与调整了收益我们看到控制器带来了一个更好的参考跟踪性能更好的上升和沉淀时间
注意,您仍然可以修改这些自动调谐实验设置为您的应用程序和进一步整合这些收益。
最后,我们看到了如何使用FOC自动调谐块调整收益桌面的磁场定向控制算法仿真模型。你也可以从这个块生成代码并将其部署到Speedgoat实时机器。然后可以自动调谐收益间接磁场定向矢量控制的实时算法对电机的硬件。