设计算法对四轴飞行器的任务student competitions, Julien Cassette joins Connell D'Souza to demonstrate the use of simulation. Simulation is a cost-effective tool to begin prototyping and designing controllers and algorithms.
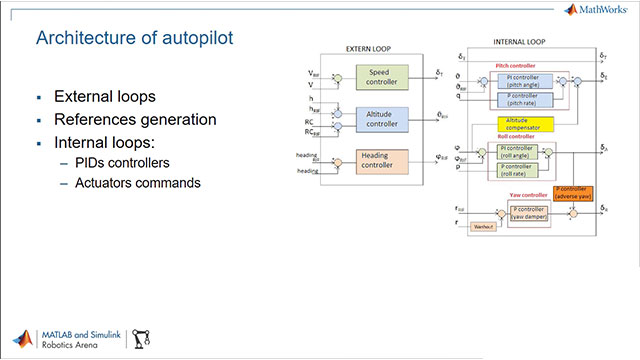
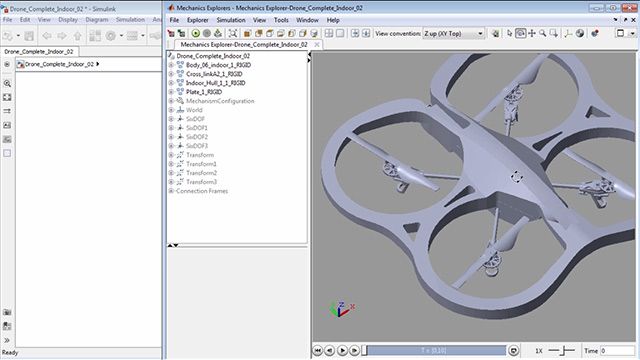
模拟模型由三个部分组成,即四轮驱动器的植物模型,一个控制器和环境。朱利安(Julien)使用凉亭对植物和环境进行建模并模拟金宝app®to design the controller. Robotics System Toolbox™ provides an interface between MATLAB®以及Si金宝appmulink和机器人操作系统(ROS)。Simulink中的控制器通过ROS金宝app消息将速度命令发送到凉亭中的植物模型。
Guazebo是一种开源物理引擎,可提供对环境的现实渲染,可以与模拟机器人操作所需的传感器模型一起自定义。您可以了解有关凉亭功能的更多信息,并查看访问该教程以开始凉亭网页。
从此演示中下载所有文件MATLAB中央文件交换。
在R2019B中下载188bet金宝搏引入了两种新产品,以补充Robotics System Toolbox™的功能:Navigation Toolbox™和ROS Toolbox™。