このページの翻訳は最新ではありません。ここをクリックして、英語の最新版を参照してください。
AUTOSARのスケジューリングとシミュレーションの構成
AUTOSARアーキテクチャモデルのスケジューリングとシミュレーションを構成するには,次の方法を使用できます。
BSWサービスへの呼び出しをシミュレートする 基本软件(BSW)ブロックを追加する。
入力およびプラント要素をアーキテクチャ モデルに接続するテスト ハーネス モデルを作成する。
スケジュール エディターを使用して、コンポーネント ランナブルの実行順序をスケジュールおよび指定する。
開いているアーキテクチャ モデルで、集約されたコンポーネントの動作をシミュレーションするには、[実行]をクリックします。
基本ソフトウェア サービス呼び出しのシミュレーション
AUTOSAR经典平台の場合、AUTOSAR区块集は基本ソフトウェア (BSW)ブロックを提供します。これにより、AUTOSARランタイム環境で実行する BSWサービスへのソフトウェア コンポーネントの呼び出しをモデル化できます。BSWサービスには NVRAM管理器(NvM)、诊断事件管理器(Dem)および 职能经理(职能指令手册)があります。ランタイム環境では、AUTOSARソフトウェア コンポーネントは通常、クライアント/サーバー通信または送信側/受信側通信を使用して BSWサービスにアクセスします。
BSW正在サービスを呼び出すAUTOSARコンポーネントをシミュレーションするには,それが含まれるアーキテクチャ,コンポジション,またはテストハーネスモデルを作成し,事前構成されたBSW正在サービスコンポーネントブロックを追加します。そのブロックは,BSW正在サービスオペレーションの参照実装を提供します。
アーキテクチャ モデル内のコンポーネントに BSW呼び出し側ブロックを使用している場合、アーキテクチャ モデルに BSWサービス実装が含まれていることを確認してください。詳細については、AUTOSAR基本ソフトウェア サービス呼び出しのモデル化およびAUTOSAR基本ソフトウェア サービスとランタイム環境のシミュレーションを参照してください。
AUTOSARアーキテクチャ モデルで BSWブロックを使用する例については、アーキテクチャ モデルによる AUTOSARコンポジションおよびコンポーネントの作成を参照してください。
テスト ハーネスの接続
アーキテクチャ モデルの作成が終わると、意味のある入力値とプラント モデル要素を提供するテスト ハーネス モデルに接続できるようになります。たとえば、アーキテクチャ モデルによる AUTOSARコンポジションおよびコンポーネントの作成の例のアーキテクチャ モデルautosar_tpc_组合について考えてみます。このモデルには要求側 (入力) ポートが 3.つあり、提供側 (出力) ポートが 1.つあります。

ここに示すのは、アーキテクチャ モデルautosar_tpc_组合をシミュレーションするためのテスト ハーネス モデルです。このテスト ハーネスには、ペダル入力ブロックおよびアーキテクチャ モデルの要求側ポートと提供側ポートに対応する信号を持つプラント モデルが含まれています。このモデルは、モデル例autosar_tpc_系统を応用したものです。

アーキテクチャ モデルをテスト ハーネスに接続するには、以下を行います。
模型ブロックを挿入します。
アーキテクチャ モデルを参照するように模型ブロックを設定します。
模型ブロックのダイアログ ボックスで、オプション[レートのスケジュール]を選択します。関連するパラメーター[次を使用してレートをスケジュール]では、
[スケジュール エディター]を選択します。アーキテクチャ モデル コンポーネントには、スケジュール エディターでスケジュール可能な明示的な分割があります。アーキテクチャ モデルのポートをテスト ハーネスの信号に接続します。


完成したテスト ハーネス モデルを表示し、実行するには、モデル例autosar_tpc_系统を開きます。(ローカルの作業フォルダー内にあるモデルを開くには、openExample(“autosar\u tpc\u系统”)を使用します)。
コンポーネント ランナブルのスケジュール
複数のランナブルを含む AUTOSAR经典平台ソフトウェア コンポーネントでは、AUTOSARタイミング拡張仕様で実行順序の制約が定義されます。これらの制約は、コンポーネント内のランナブル エンティティの実行順序を指定します。制約の表示と操作はコンポーネント レベルで実行でき、AUTOSARアーキテクチャ モデルでは仮想機能バス (VFB)レベルで実行できます。
アーキテクチャ モデルでは、次を実行できます。
ARXMLファイルから VFBレベルの実行順序の制約をインポートする。
スケジュール エディターを使用して AUTOSARコンポーネント ランナブルの実行順序を変更する。エディターには、そのコンポジション階層のすべてのコンポーネントのすべてのランナブルが表示されます。
コンポジションのエクスポートの一環として、VFBレベルの実行順序の制約を ARXMLタイミング モジュール
模型名称_timening.arxml
AUTOSARコンポーネントランナブルの実行順序をスケジューリングおよび指定するには,スケジュールエディターを使用します。スタンドアロンのコンポーネントモデルまたはアーキテクチャモデルから,次を実行できます。
AUTOSARコンポーネントまたはアーキテクチャモデルでの分割としてコンポーネントランナブルのグラフィカルな表現を表示する。
分割を作成し、それらを AUTOSARランナブルにマッピングする。
ランナブルの実行順序を直接指定する。
スケジュール エディターは、レートベースおよびエクスポート関数モデリングを含む、複数のモデリング スタイルをサポートします。詳細については、スケジュール エディターの使用および分割の作成を参照してください。AUTOSARコンポーネント モデル例については、AUTOSARランナブルの実行順序の設定を参照してください。
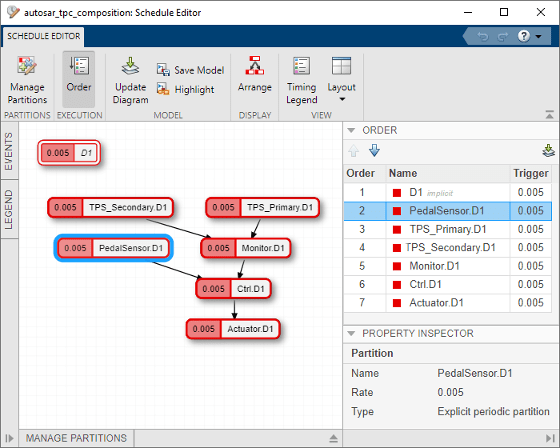
AUTOSARアーキテクチャ モデルでスケジュール エディターを開くには、[建模]タブを開き,[设计工具]、[スケジュール エディター]を選択します。エディターには,そのコンポジション階層のすべてのコンポーネントのすべてのランナブルが表示されます。ここに示すのは,アーキテクチャモデル例autosar_tpc_组合からスケジュール エディターを開いたときの実行順序の表示です。エディターのコントロールを使用して、ランナブルの実行順序を変更します。
AUTOSARアーキテクチャ モデルからコンポジションをエクスポートすると、VFBレベルの実行順序の制約がファイル模型名称_timening.arxmlautosar_tpc_组合のランナブルに対してエクスポートされた実行順序の制約を示しています。
. TPC_组合 <执行顺序约束UUID=“…”> EOC /Components/TPC\u COMPOSITION PedalSensor_PedalSensor_Step< /字> < COMPONENT-IREF > < TARGET-COMPONENT-REF DEST =“SW-COMPONENT-PROTOTYPE”> /组件/传感器/ PedalSensor < / TARGET-COMPONENT-REF > < / COMPONENT-IREF > < EXECUTABLE-REF DEST =“RUNNABLE-ENTITY”> /组件/ PedalSensor / PedalSensor_IB / PedalSensor_Step < / EXECUTABLE-REF > < SUCCESSOR-REFS > < SUCCESSOR-REF DEST =“EOC-EXECUTABLE-ENTITY-REF”>/Timing/TPC_Composition/EOC/TPS_Primary_ThrottleSensor1_Step <字>TPS_Primary_ThrottleSensor1_Step … TPS_辅助_节流传感器2_步骤 … 监视器\节流传感器监视器\步骤 … Ctrl\u控制器\u步骤 … 执行机构执行机构步骤< /字> < COMPONENT-IREF > < TARGET-COMPONENT-REF DEST =“SW-COMPONENT-PROTOTYPE”> /组件/ TPC_Composition /致动器< / TARGET-COMPONENT-REF > < / COMPONENT-IREF > < EXECUTABLE-REF DEST =“RUNNABLE-ENTITY”> /组件/致动器/ Actuator_IB / Actuator_Step < / EXECUTABLE-REF > < / EOC-EXECUTABLE-ENTITY-REF > < / ORDERED-ELEMENTS > < / EXECUTION-ORDER-CONSTRAINT > /Components/TPC_Composition
参考
関連するトピック
您还可以从以下列表中选择网站:
