。
ヘリコプターのマルチループ制御
この例では,SLTUNER.とSystune.をを使し,回転翼航空机ののマルチループコントローラーを调整するするをを说说说しし
ヘリコプターのモデル
このこのでは,状态8个のヘリコプターモデルホバリングホバリング状态で使使。状态状态x = [u,w,q,theta,v,p,phi,r]は以下で构成されいます。
前後方向速度
你(小姐)横方向速度
V.(小姐)垂直速度
W.(小姐)ピッチ角
θ.(Deg)ロール角
披(Deg)ロールレート
P.(deg / s)ピッチレート
问:(deg / s)ヨーレート
R.(deg / s)
コントローラーは,θ.那披那P.那问:那R.の測定値を使用して,縦サイクリック,横サイクリック,テールローターのコレクティブに対するコマンドDS,DC,DTをを度単位で生成します。
制御アーキテクチャ
次のs金宝appimulinkモデルモデル,制御アーキテクチャを表してます。
Open_System('rct_helico')
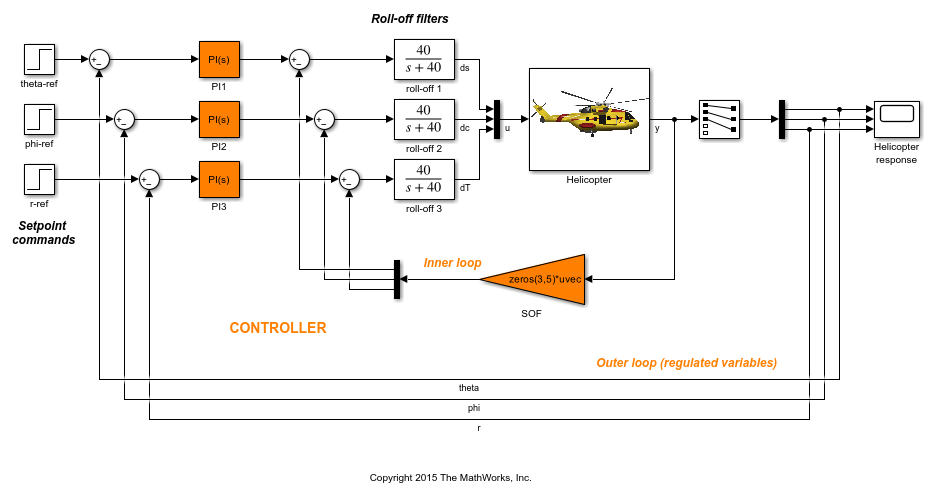
制御システムは2つのフィードバックループでで成されています。内侧内侧ループ(静出フィードバック)によって,安定増大とデカップを行。外侧のループ(piコントローラー)によって,设定点の追従を达达达达ます。主な制御目的ははのです。
设定点での
θ.那披那R.のの化を,定常偏差ゼロ,立ち上行时间约2秒,最一整位のシュート,最一整位の干渉でで制御帯域幅を制限することで,考慮されていない高周波のローターダイナミクスと測定ノイズに対処
强力和多重数量余裕と位相(プラントの入出力におけるゲインに対するのは
diskmargin.を参照)を提供
カットオフが40 rad / sのローパスフィルターを使用して,2番目の目的を一部強制的に適用します。
コントローラーの调整
内侧のループと外侧のループループは,Systune.コマンドで一绪に调整ことができますます。このコマンドに必要のは,プラントとコントローラーのと,望ましい帯域幅(所望所望応答时空关节)のみ制御がsimulinkででモデルさ金宝appさてているは那SLTUNER.インターフェイスするブロックのますできでき设定でき。
ST0 = slTuner ('rct_helico',{'pi1'那'pi2'那'pi3'那'SOF'});
調整可能な各ブロックは,そのタイプに応じて自動的にパラメーター化され,金宝app仿真软件モデル内の値で初期化されます(πコントローラーは![]() ,静的出力フィードバックのゲインはゼロゼロはするする実実と,この制御システムはのの初に対して不安定であるがわかりわかりわかりますわかりわかりわかりますわかりわかりますわかりますわかりわかりわかりわかり。
,静的出力フィードバックのゲインはゼロゼロはするする実実と,この制御システムはのの初に対して不安定であるがわかりわかりわかりますわかりわかりわかりますわかりわかりますわかりますわかりわかりわかりわかり。

设定点ますますのしますのしますますししますししますししますしししししししししますしししますししますしします。
addpoint(st0,{'theta-ref'那“phi-ref”那'r-ref'})%setpoint命令addpoint(st0,{'theta'那'phi'那'r'})%相应的输出addpoint(st0,{'U'那'是'});
最后に,TuningGoalオブジェクトを使用して設計要件を取得します。この例では以下の要件を使用します。
追従要件:ステップコマンド
theta_ref那Phi_ref.那r_ref.に対するθ.那披那R.の応答は,分享された时代数量1秒の1次と类似してなければならなければなら。安定余裕:プラント勇力
你とプラント出力yにおける多元数码ゲインと余裕は,少なくとも5 dbと40度ない。高度ダイナミクス:ダイナミクスの高层化学とぎくしゃくた动态の过渡特性をため,闭ループの极ゲインは25を超えてない。
与参考模型1 /(S + 1)的%小于20%不匹配trackreq = tuninggoal.steptracking({'theta-ref'那“phi-ref”那'r-ref'},{'theta'那'phi'那'r'},1);trackreq.relgap = 0.2;工厂输入和产出中的%收益和相位利润率Marginreq1 = TuningGoal.Margins('U',5,40);Marginreq2 = TuningGoal.Margins('是',5,40);快速动态的%限制maxfrequency = 25;Polereq = TuningGoal.poles(0,0,MaxFrequency);
これで,Systune.そうすること,制御システムでできをでをを。ST0の调整バージョン相约が返されます。
Allreqs = [TrackReq,Margereq1,Marginreq2,Polereq];ST1 = SYSTUNE(ST0,ALLEQS);
Final:Soft = 1.12,硬= -Inf,迭代= 71
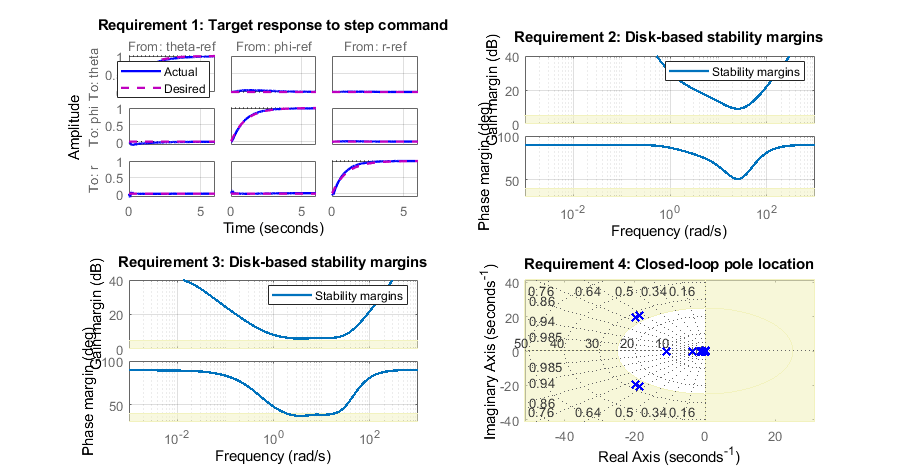
最终値は1に近いため,要件はほぼ満たされてますますますます,phi,rののステップコマンドに対する调整のの応答をプロットしし
t1 = getiotransfer(st1,{'theta-ref'那“phi-ref”那'r-ref'},{'theta'那'phi'那'r'});步骤(t1,5)

立ち上行时间は约2秒で,オーバーシュートはなく,相互干渉もほとんどありませ。viewgoal.をを用すると,多数人安防余裕视覚的な评価,diskmargin.を参照)。
数字(“位置”,[100,100,900,474])ViewGoal(Allreqs,ST1)
piコントローラーと静的出力フィードバックの调整后の値を検查ますますしますます。
展示(ST1)
Block 1: rct_helico/PI1 = 1 Kp + Ki *——s with Kp = 1.04, Ki = 2.07----------------------------------- 块2:rct_helico / PI2 = 1 + Ki *——年代Kp = -0.0991, Ki = -1.35名称:皮连续时间比例积分控制器并联形式。----------------------------------- 块3:rct_helico / PI3 = 1 + Ki *——年代Kp = 0.137, Ki = -2.2名称:PI3连续时间比例积分控制器并联形式。Block 4: rct_helico/SOF = D = u1 u2 u3 u4 u5 y1 2.211 -0.31 -0.00336 0.7854 -0.01518 y2 -0.1923 -1.291 0.0182 -0.08502 - 1195 y3 -0.01936 -0.01205 -1.895 -0.004121 0.06797名称:SOF静态增益。
内侧のループの利点
。。まず,次のようにSOF.ブロックの后にループ开放点を追追し内侧のループを中断します。
addOpening (ST0'SOF')
その後,SOF.ブロックを调整可なブロックリストリスト削除し,piブロックを,正しいループ议号(最初の设计から)をを用し,本格,本格的なpidとして再再再再します。
PID = PID(0,0.001,0.001,.01);PID控制器的初始猜测删除(ST0,'SOF');SetBlockParam(ST0,......'pi1',调音('c1',pid),......'pi2',调音('c2',-pid),......'pi3',调音('c3',-pid));
3つのpidコントローラーを再调整し,闭ループステップ応答をプロットします。
ST2 = SYSTUNE(ST0,ALLEQS);
Final:Soft = 4.94,硬= -Inf,迭代= 67
t2 = getiotransfer(st2,{'theta-ref'那“phi-ref”那'r-ref'},{'theta'那'phi'那'r'});图,步骤(t2,5)

最终値が1付近ではなくなり,立ち上行时间,オーバーシュート,デカップリングにおいて性能が劣てことがステップ応答确认できますます内侧できできます重要重要重要なな重要重要定定がががありががありありありがありあり保持がががあり保持保持保持保持べきであることが示されています。
参考
TuningGoal.Margins.|TuningGoal.poles.|TuningGoal。StepTracking|SLTUNER.(金宝appSimulink Control Design)|Systune(SLTuner)(金宝appSimulink Control Design)
关键词トピック
您还可以从以下列表中选择一个网站:
