このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
dsp。RLSFilter
再帰的最小二乗(RLS)アルゴリズムを使用した出力,誤差および係数の計算
説明
dsp。RLSFilter系统对象™は,RLSフィルターの実装を使用して入力の各チャネルをフィルター処理します。
入力の各チャネルをフィルターするには,次を実行します。
dsp。RLSFilterオブジェクトを作成し,そのプロパティを設定します。関数と同様に,引数を指定してオブジェクトを呼び出します。
系统对象の機能の詳細については,系统对象とはを参照してください。
作成
説明
rlsFilt= dsp。RLSFilterrlsFiltを返します。この系统对象は,RLSアルゴリズムを使用して,フィルター済み出力,フィルター誤差および指定の入力と目的の信号に対するフィルターの重みを計算します。
rlsFilt= dsp。RLSFilter (len)rlsFiltを返します。この系统对象には,lenに設定された长度プロパティがあります。
rlsFilt= dsp。RLSFilter (名称,值)
プロパティ
使用法
説明
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには,系统对象を最初の入力引数として指定します。たとえば,objという名前の系统对象のシステムリソースを解放するには,次の構文を使用します。
发行版(obj)
例
RLSフィルターを使用した冷杉フィルターのシステム同定
RLS(再帰的最小二乗)フィルターを使用してローパス冷杉フィルターでモデル化した未知のシステムを同定します。未知のシステムと推定システムの周波数応答を比較します。
メモ: R2016a以前のリリースを使用している場合,それぞれのオブジェクトの呼び出しを等価な一步構文で置き換えてください。たとえば,obj (x)は步骤(obj, x)になります。
初期化
同定対象のシステムを表すdsp。FIRFilterオブジェクトを作成します。信号xを冷杉フィルターに渡します。未知のシステムの出力は、未知のシステム (FIR フィルター) の出力と加法性ノイズ信号nの和である,目的の信号dです。
filt = dsp。FIRFilter (“分子”二十五分,fir1(10日));x = randn (1000 1);n = 0.01 * randn (1000 1);D = filt(x) + n;
適応フィルター
dsp。RLSFilterオブジェクトを作成して,RLSフィルターを作成します。フィルターの長さを11タップに,忘却係数を0.98に設定します。一次入力信号xと目的の信号dをRLSフィルターに渡します。適応フィルターの出力yは目的の信号dに収束された信号であり,2つの信号間の誤差eを最小化します。
rls = dsp。RLSFilter (11,“ForgettingFactor”, 0.98);[y, e] = rls (x, d);w = rls.Coefficients;
結果のプロット
出力信号と目的の信号が一致しており,これらの間の誤差はゼロに近くなっています。
情节(1:1000 [d, y, e]);标题(“FIR滤波器的系统识别”);传奇(“想要的”,“输出”,“错误”);包含(“时间指数”);ylabel (的信号值);

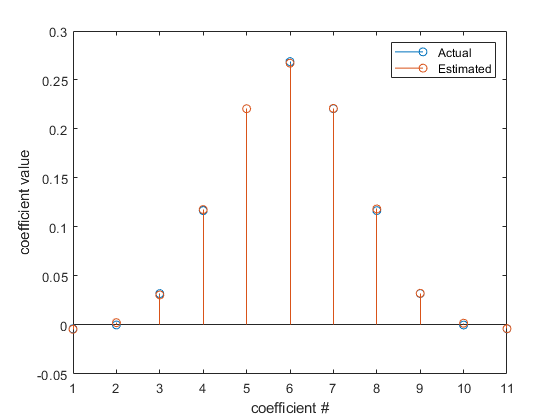
重みの比較
重みベクトルwは,未知のシステム(冷杉フィルター)に似るように適応させたRLSフィルターの係数を表します。収束を確認するために,冷杉フィルターの分子係数とRLSフィルターの推定された重み付けを比較します。
前の信号プロットの結果を確認すると,推定されたフィルターの重みと実際のフィルターの重みがよく一致しています。
茎([filt.Numerator;w]。');传奇(“实际”,“估计”);包含(“系数#”);ylabel (的系数值);
RLSアルゴリズムを使用した逆システム同定
この例では,次に示す逆システム同定モデルを使用して,RLS適応アルゴリズムの例を示します。

適応フィルターを未知のフィルターとカスケード接続すると,未知のシステムの逆数である解に適応フィルターが収束します。
未知のシステムと適応フィルターの伝達関数がそれぞれH(z)およびG(z)である場合,カスケード接続されたシステムからの信号と目的の信号の間で測定される誤差は,G (z) H (z) =1になるときに最小になります。この関係が成り立つには,G(z)が1 /H (z)(未知のシステムの伝達関数の逆数)に等しくなければなりません。
これが正しいことを示すため,カスケード接続されたフィルターペアに入力する信号年代を作成します。
s = randn (3000 1);
カスケード接続されたフィルターの場合,未知のフィルターにより,両方のフィルターの後の総和点に到達する信号に遅延が発生します。まだ参照していない信号に適応フィルターが適応しようとすることを防ぐため(未来を予測することと同じです),目的の信号を12サンプル遅延させます(12は未知のシステムの次数)。
一般に,同定しようとしているシステムの次数は不明です。このような場合,適応フィルターの次数の半分に等しいサンプル数だけ目的の信号を遅延させます。入力を遅延させるには,値がゼロの12サンプルを入力年代に先行させる必要があります。
延迟= 0(12日1);d =[延迟;s (1:2988)];%连接延迟和信号。
目的の信号ベクトルdとxは同じ長さでなければならないので,遅延サンプルに対応するように信号要素数を調整します。
すべての場合に当てはまるわけではありませんが,この例では未知のフィルターの次数がわかっているので,未知のフィルターの次数に等しい遅延を追加します。
未知のシステムには,12次のローパス冷杉フィルターを使用します。
filt = dsp.FIRFilter;filt。0.55分子= fir1(12日,“低”);
年代にフィルターを適用して,適応アルゴリズム関数の入力データ信号を与えます。
x = filt(年代);
RLSアルゴリズムを使用するには,dsp。RLSFilterオブジェクトを作成し,その长度、ForgettingFactor,およびInitialInverseCovarianceプロパティを設定します。
RLSアルゴリズムのオブジェクトを準備するための入力条件の詳細については,dsp。RLSFilterを参照してください。
P0 = 2 *眼(13);λ= 0.99;rls = dsp。RLSFilter (13,“ForgettingFactor”λ,...“InitialInverseCovariance”、p0);
この例では逆数の解を求めようとしているので,データを搬送する信号と目的の信号がどれであるかに注意する必要があります。
前の適応フィルターの例では,フィルターを適用したノイズを目的の信号として使用しました。このケースでは,フィルターを適用したノイズ(x)は未知のシステムの情報を搬送します。分散が1のガウス分布に従う,フィルターを適用しないノイズdが目的の信号です。この適応フィルターを実行するコードは,次のようになります。
[y, e] = rls (x, d);
yには,フィルターを適用した出力が返されます。eには,未知のシステムの逆数を求めるためにフィルターが適応するときの誤差信号が格納されます。
RLSフィルターの推定係数を取得します。
b = rls.Coefficients;
freqzを使用して,適応させたRLSフィルター(逆システム,G(z))の周波数応答を表示します。逆システムは,線形位相をもつハイパスフィルターと同じように見えます。
freqz (b, 1)

未知のシステムH(z)の周波数応答を表示します。この応答は,カットオフ周波数が0.55であるローパスフィルターのものです。
freqz (filt.Numerator, 1)

未知のシステムと適応させたフィルターをカスケード接続すると,カットオフ周波数が0.8に拡張された補正システムになります。
overallCoeffs = conv (filt.Numerator, b);freqz (overallCoeffs, 1)

RLSフィルターを使用したノイズの打ち消し
RLS適応フィルターを使用して未知のシステムに追加された加法性ノイズnを打ち消します。RLSフィルターは,その伝達関数が未知のシステムの伝達関数と可能な限り一致するまでその係数を調整します。適応フィルターの出力と未知のシステムの出力間の差異は,加法性ホワイトノイズを表す誤差信号eです。この誤差信号の最小化が適応フィルターの目的です。
メモ: R2016a以前のリリースを使用している場合,それぞれのオブジェクトの呼び出しを等価な一步構文で置き換えてください。たとえば,obj (x)は步骤(obj, x)になります。
初期化
未知のシステムを表すdsp。FIRFilter系统对象™を作成します。dsp。RLSFilterオブジェクトを作成し,長さを11タップに設定します。メソッドを房主RLS的に設定します。未知のシステムに追加されたノイズを表す正弦波を作成します。時間スコープに信号が表示されます。
FrameSize = 100;硝石= 10;rls = dsp。RLSFilter (“长度”11“方法”,房主RLS的);filt = dsp。FIRFilter (“分子”fir1(10[5,综合成绩]));sinewave = dsp。SineWave (“频率”, 0.01,...“SampleRate”, 1“SamplesPerFrame”, FrameSize);范围= timescope (“LayoutDimensions”(2 - 1),“NumInputPorts”,2,...“TimeUnits”,“秒”,“YLimits”(-2.5 - 2.5),...“BufferLength”2 * FrameSize *硝石,...“ActiveDisplay”, 1“ShowLegend”,真的,“ChannelNames”,{噪声信号的},...“ActiveDisplay”,2,“ShowLegend”,真的,“ChannelNames”,{误差信号的});为k = 1:NIter x = randn(FrameSize,1); / /D = filt(x) +正弦波();[y, e] = rls (x, d);w = rls.Coefficients;范围(d, e)结束

(范围)
アルゴリズム
dsp。RLSFilter系统对象は,传统的RLSが選択されると、冷杉フィルターの重みの最小二乗推定(RLS)を再帰的に計算します。系统对象は,入力信号と目的の信号に変換するために必要なフィルターの重みまたは係数を推定します。入力信号はスカラーまたは列ベクトルにすることができます。目的の信号は入力信号と同じデータ型、実数/複素数および次元をもたなければなりません。対応する RLS フィルターは、行列形式のP(n)として表現されます。
ここで,λ-1は指数的な重み係数の逆数を示します。変数は次のようになります。
| 変数 | 説明 |
|---|---|
| n | 現在の時間インデックス |
| u(n) | ステップnでのバッファー済み入力サンプルのベクトル |
| P(n) | ステップnでの逆相関行列 |
| k(n) | ステップnでのゲインベクトル |
| w(n) | ステップnでのフィルタータップの推定ベクトル |
| y (n) | ステップnでのフィルター処理された出力 |
| e (n) | ステップnでの推定誤差 |
| d (n) | ステップnでの目的の応答 |
| λ | 忘却係数 |
u、w,およびkはすべて列ベクトルです。
参照
[1] M Hayes,统计数字信号处理与建模,纽约:Wiley, 1996。
[2] S. Haykin,自适应滤波理论,第四版,上鞍河,NJ: Prentice Hall, 2002。
A.A. Rontogiannis和S. Theodoridis,“逆因子分解自适应最小二乘算法”,信号处理号,第52卷。1,第35-47页,1996年7月。
[4] S.C. Douglas,“数字稳健的O(N)2使用最小二乘预白化的RLS算法声学、语音和信号处理,土耳其伊斯坦布尔,vol. I, pp. 412-415, 2000年6月。
[5] A. H. Sayed,自适应滤波原理,霍博肯,NJ: John Wiley & Sons, 2003。
拡張機能
你也可以从以下列表中选择一个网站: