MTPA控制参考
计算每安培最大转矩(MTPA)和弱磁场操作的参考电流
- 库:
电机控制模块/控制/控制参考
描述
的<年代p一个n class="block">MTPA控制参考块计算
该块接受参考扭矩和反馈机械速度,并输出相应的
该模块通过求解数学关系计算参考电流值。计算采用国际单位制。当使用Per-Unit (PU)系统时,块将PU输入信号转换为SI单位进行计算,并在输出时将其转换回PU值。
这些方程描述了参考的计算
永磁同步电动机的数学模型
这些模型方程描述了永磁同步电动机在转子磁链参考系下的动力学:
地点:
是
是
是
是
为定子相绕组电阻(欧姆)。
为永磁磁链(Weber)。
是
是
为定子电压频率所对应的电转速,单位为弧度/秒。
为转子机械速度(弧度/秒)。
是
是
为永磁同步电动机产生的机电转矩(Nm)。
为加载力矩(Nm)。
为电机极对数。
惯性系数(kg-m<年代up>2).
摩擦系数(kg-m<年代up>2/秒)。
基地的速度
基准转速是电机在额定电压和额定负载下,在弱磁场区域之外的最大转速。这些方程描述了电机基本转速的计算。
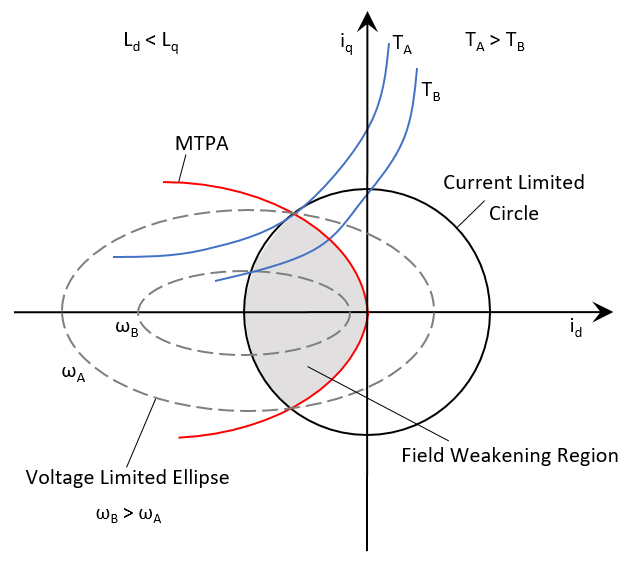
逆变器电压约束通过计算
电流限位圈定义了电流约束,可以认为是:
在上式中,<年代p一个n class="inlineequation"> 为零的表面pmsm。对于内部pmsm,值为<年代p一个n class="inlineequation"> 而且<年代p一个n class="inlineequation"> 相应的MTPA被考虑。
利用前面的关系,我们可以计算出基本速度为:
地点:
为定子电压频率所对应的电转速,单位为弧度/秒。
为电机的机械基本速度(弧度/秒)。
是
是
是
是
是
是
为定子相绕组电阻(欧姆)。
为永磁磁链(Weber)。
是
是
为提供给电机的最大基本线到中性电压(峰值)(伏特)。
为输入到逆变器的直流电压(伏特)。
为电机的最大相电流(峰值)(安培)。
为电机极对数。
表面永磁同步电动机
对于表面永磁同步电动机,您可以通过使用零来实现最大扭矩
如果<年代p一个n class="inlineequation"> :
如果<年代p一个n class="inlineequation"> :
用于计算的饱和函数<年代p一个n class="inlineequation"> 描述如下:
如果<年代p一个n class="inlineequation"> ,
如果<年代p一个n class="inlineequation"> ,
如果<年代p一个n class="inlineequation"> ,
该块输出以下值:
地点:
为定子电压频率所对应的电转速,单位为弧度/秒。
为转子机械速度(弧度/秒)。
为电机的机械基本速度(弧度/秒)。
为电机的电气基本速度(弧度/秒)。
是
是
为参考扭矩(Nm)。
为电机极对数。
为永磁磁链(Weber)。
是
是
是
为电机的最大相电流(峰值)(安培)。
是
是
是
是
室内永磁同步电动机
对于一个内部永磁同步电动机,你可以通过计算最大扭矩
MTPA和磁场削弱操作的参考电流由以下公式定义:
如果<年代p一个n class="inlineequation"> ,
如果<年代p一个n class="inlineequation"> ,
如果<年代p一个n class="inlineequation"> ,
如果<年代p一个n class="inlineequation"> ,
对于负参考扭矩值,符号为<年代p一个n class="inlineequation"> 而且<年代p一个n class="inlineequation"> 更新并相应地修改方程。
地点:
为产生参考转矩的估计最大电流(安培)。
为估计最大电流饱和值(安培)。
是最大值
是最大值
为参考扭矩(Nm)。
是
是
为电机极对数。
为永磁磁链(Weber)。
是
是
是
是
为电机的最大相电流(峰值)(安培)。
为提供给电机的最大基本线到中性电压(峰值)(伏特)。
是
是
为定子电压频率所对应的电转速,单位为弧度/秒。
是
是
是
是
为电机的机械基本速度(弧度/秒)。
港口
输入
输出
参数
模型的例子
参考文献
[1]
[2]
[3]
[4]
[5]
[6]
[7]
扩展功能
版本历史
您也可以从以下列表中选择一个网站: