主要内容
ヒューマノイドロボット
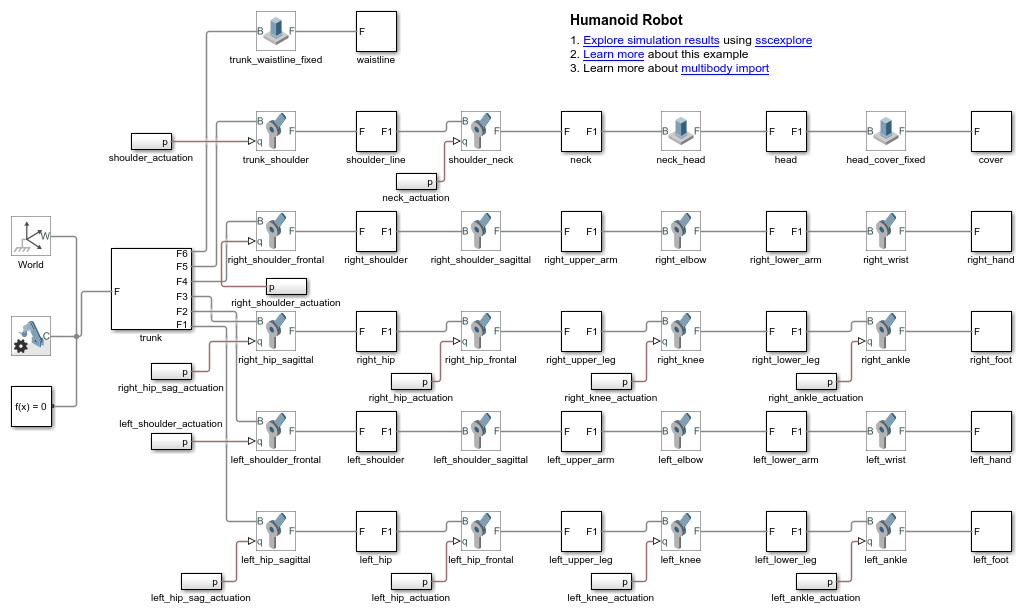
この例は,smimportコマンドコマンドを使しurdfファイルからインポートしものもの。urdfファイル“sm_humanoid.urdf”とロボットのパーツ可视するファイルを使使しててをををてい。をさせるために,インポートしたモデルに手动でジョイントのモーションの作动を追加しています。
您还可以从以下列表中选择一个网站:
この例は,smimportコマンドコマンドを使しurdfファイルからインポートしものもの。urdfファイル“sm_humanoid.urdf”とロボットのパーツ可视するファイルを使使しててをををてい。をさせるために,インポートしたモデルに手动でジョイントのモーションの作动を追加しています。
您还可以从以下列表中选择一个网站:
