。
ブラシレスDCモーター
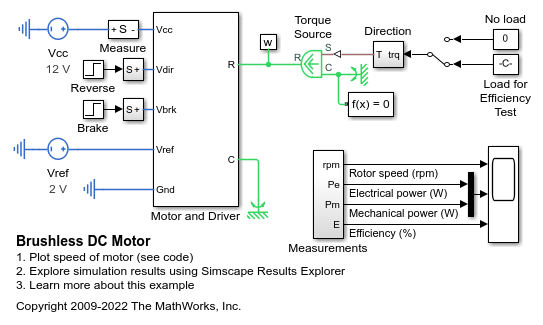
この例では,ブラシレスDCモーター(サーボモーター)のシステムレベルモデルをデータシート情报に基づいて作成し,パラメーター化する方法を说明します。モーターとドライバーは,単一のマスクサブシステムとしてモデル化されています.金宝appSimulink®でモデルを表示する场合,马达和驱动器ブロックを选択して按Ctrl + Uと入力すると,マスクの下を见てモデルの构造を确认できます。
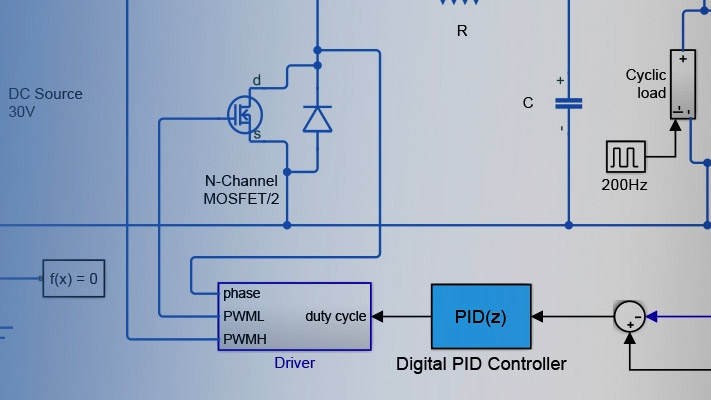
このブラシレスDCモーターのモデルでは,标准的な构成が使用されます。内侧のフィードバックループが电流を制御し,外侧のフィードバックループがモーター回転数を制御します。速度要求はVref的ピンで示される电圧によって设定され,モーターの回転方向はVDIRピンで示される电圧によって设定されます.Vbrkピンでの电圧が高くなるとVref的がオーバーライドされ,速度要求がゼロに设定されてブレーキ操作が実行されます。
このモデルでは速度要求が2 Vに设定されますが,これは40,000rpm离心に相当します0.1秒后,VDIRピンが高い値に设定され,モーターは反転して-40,000转になります0.2秒后,ブレーキピンであるVbrkが高い値に设定され,モーターは减速して0 RPMになります。ブラシレスDCモーターの效率は,电力入力に対する机械动力の比として计算されます。したがって,回転子の惯性が原因で,一时的に0〜100%の范囲外になることがあります。
ブラシレスDCモーターのメーカーデータシートによれば,停动トルクは0.44 MNM,最大许容速度は100000 rpm时,机械的时定数は5毫秒,回転子の惯性は0.005 GCM ^ 2,效率は41%(0.23 MNM,40,000rpmのとき),无负荷电流は22毫安,定格电圧は12 Vです。时定数は,メーカーの,ブロック整流を使用するモータードライバーの使用に基づいています。速度の基准电圧が最大の+5 Vになり,指令速度が100000转になるように,モータードライバーを构成できます。
电机及驱动器サブシステムの伺服电机ブロックを使用して,内部电流のフィードバックループをモデル化し,さらに机械入力と电力のバランスを取ります。システム设计では,通常,モータードライバーによって制御される电流スイッチングをモデル化する必要はありませんが,トルク速度特性とDC电源からの电流が适切であることを确认する必要はあります。最大トルク値のベクトルは,実际にはドライバーの最大电流によって决定されます。モータードライバーには通常,最大定格モータートルクと一致させなければならない最大电流设定があるか,または,モーターが指定过剰の场合に负荷に适用される最大トルクがあります。ここでは,最大トルク値のベクトルは,最大速度100000转までと,それを超えるモーター停动トルクに设定されます。モーターとドライバーが使用されるシステムによって,高トルクと高速の合わさった长时间の运転でモーターが过热することのないように确実な处理が行われることが仮定されます。
モーターの电力损失は2项で构成されていると仮定します。最初の项は负荷と独立した固定损失で,Vcc的* I0として计算されます。ここで,Vcc的は定格电源电圧であり,I0はドライバー电源からの无负荷の直流电流です。この例の基となっているドライバーでのようにブロック整流が使用されている场合,I0は,励磁された相巻线の电流の2倍になります。2 番目の損失項は、モーターの瞬時巻線電流の 2 乗に比例します。これは、平均トルクの 2 乗に比例する項として近似できます。2 つの損失項は Servomotor ブロックによって実装されます。
データシート値に一致するよう调整しなければならない,3つの马达和驱动器マスクパラメーターがあります。速度フィードバックコントローラーの比例ゲインと积分ゲイン,そして内侧ループ电流コントローラーの时定数です。ここでは,データシートで无负荷时定数が5毫秒に指定されています。通则として,内侧の制御ループは外侧のループより10倍以上高速にする必要があります。つまり,电流コントローラーでは时定数を0.5毫秒とします。この値を设定したうえで,速度时定数が约5毫秒になるまで比例项を大きくします。次に,负荷をかけて速度ステップを実行している间に积分ゲインを设定し,5毫秒ほどで定常偏差が取り除かれるまでこれを増加させます。その后,无负荷において5毫秒の立ち上がり时间を回复するために,2つのゲインを微调整する必要があります。
モデル
电机及驱动器サブシステム

的Simscapeログからのシミュレーション结果
以下のプロットは,変化する条件下でのブラシレスDCモーターの速度を示しています。负荷トルクは定数値で,常にシャフトの回転と反対になります。方向反転とブレーキのコマンドが适用されます。

您还可以从以下列表中选择一个网站: