このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
連続伝導モードのプッシュプル降圧コンバーター
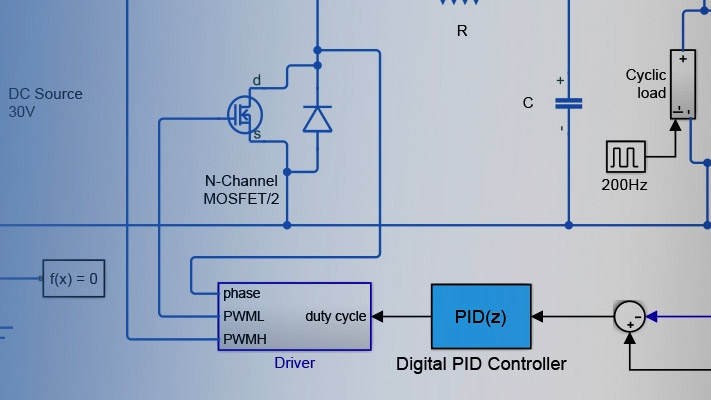
この例では,プッシュプル降圧コンバーターの出力電圧を制御する方法を説明します。インダクターを流れる電流がゼロになることはないため,この直流-直流コンバーターは連続伝導モード(CCM)で動作します。定格出力電圧への変換と維持のために,PI控制器サブシステムでは単純な積分制御を使用します。起動時に,基準電圧が目的の出力電圧まで上昇します。
コンバーターは次の場合にのみCCMで動作します。
ここで,
 。
。
 。
。
 はフィルターのインダクタンス。
はフィルターのインダクタンス。
 は負荷抵抗。
は負荷抵抗。
 は各MOSFETのスイッチング周期。つまり,
は各MOSFETのスイッチング周期。つまり, がスイッチング周波数として,
がスイッチング周波数として, 。
。
 は,各MOSFETのゲートに対するPWM入力のデューティ比。つまり,
は,各MOSFETのゲートに対するPWM入力のデューティ比。つまり, がMOSFETのオン時間として,
がMOSFETのオン時間として, 。
。
モデルを开放
open_system ('ee_push_pull_converter_ccm.slx');

设计パラメーターの指定
システムは,1000 Wの全負荷電力容量で80 Vの出力電圧を生成し,維持する必要があります。入力電圧は400 Vで,変圧器の巻数比は2です。全負荷には,定負荷と周期的負荷が含まれまee_push_pull_converter_ccm_dataす。”。米的スクリプトは,設計パラメーターをMATLAB®ワークスペースの変数として定義します。
INPUT_VOLTAGE = 400;Pive-Pull转换器的%输入电压[V]Output_Voltage = 80;%期望从推挽变换器输出电压[V]Output_Power = 1000;%满载功率输出[W]fsw_Hz = 40000;MOSFET开关频率[Hz]primary_winding = 200;%主绕组的匝数secondary_winding = 100;次级绕组中的百分之次数TR = primary_winding / secondary_winding;%匝比kp = 0.01;PI控制器的比例增益Ki = 20;PI控制器%积分增益del_I = 40;峰值-峰值电感纹波电流占满载电流的百分比del_v = 1;%峰值输出电压纹波占输出电压的百分比share_constload = 70;%恒载牵引的负载电流百分比share_cyclicload = 100-share_constload;%循环负载占负载电流的百分比cyclic_load_period = 1/20;%循环负载周期cyclic_load_pul_width = 50;%由循环负载绘制的电流脉冲的脉冲宽度Ts = 1 e;%求解器的采样时间
开ループのデューティ比の计算
デューティデューティ比,入力电流,巻数比および目的のの力电阻圧异ますます。
责任= Output_Voltage / (Input_Voltage / TR);
定負荷抵抗の決定
I_fl_average = Output_Power / Output_Voltage;%负载平均电流流过负载R_const = Output_Voltage / I_fl_average;
フィルターインダクタンスの計算
0〜100%に対して动作するよう求めますます。下限无助于电力が全电力の20%であるである合,平均电阻は,全全平静电阻i_fl_averageの20%になります。下限条件における各のの终了,での电视はゼロになりますます。この时代のインダクターのリップル电阻电阻德尔_は,平台电力负荷电阻の2倍,つまりつまり负荷平衡均力电阻流40%です。
L_min = (Input_Voltage / TR) * * (1-Duty) / (2 * fsw_Hz职责* del_I * I_fl_average *...0.01);
インダクター电视リップルに対するインダクタンスインダクタンスプロット
次のプロットを生成し,フィルターインダクタンスがインダクターのリップル電流にどのように関係しているかを確認します(全負荷電流のパーセント比として表す)。この例では,40%の位置にあるマーカーは1.2 e-04 Hのインダクタンスに対応しています。
del_i_range = 20:0.1:50;%满载电流百分比(20-50%)L_range = (Input_Voltage / TR) * * (1-Duty)。/ (2 * fsw_Hz * del_I_range *...I_fl_average * 0.01);图;持有上;plot(del_i_range,l_range);持有上;L_del_I = (Input_Voltage / TR) * * (1-Duty) / (2 * fsw_Hz职责* del_I *...I_fl_average * 0.01);情节(del_I L_del_I,'*');包含(“电感电流纹波(满载电流的%)”);ylabel (“电感(H)”);标题(“电感Vs电感电流纹波”);

フィルターの静電容量の選択
C_min = (Input_Voltage / TR) * * (1-Duty) /(8 *义务(2 * fsw_Hz) ^ 2 * L_min *...Output_Voltage * del_V * 0.01);
电气リップルに対するに対する电流のプロット
次のプロットを生成し,出力電圧リップルを制限するための静電容量が設計パラメーターによってどのように変わるかを確認します。この例では,出力電圧リップル1%の位置にあるマーカーは9.766 e-06 Fの静電容量に対応しています。
del_v_range = 0.5:0.1:5;c_range =(input_voltage / tr-output_voltage)* duty ./(8 *(2 * fsw_hz)^ 2 * l_min *...Output_Voltage * del_V_range * 0.01);图;持有上;情节(del_V_range C_range);持有上;C = (Input_Voltage / TR-Output_Voltage) *责任/ (8 * (2 * fsw_Hz) ^ 2 * L_min *...Output_Voltage * del_V * 0.01);情节(del_V C'*');包含(的电压纹波(%));ylabel (“电容(F)”);标题(“电容Vs电压纹波”);

シミュレーションの実行
sim卡('ee_push_pull_converter_ccm.slx');
シミュレーション結果の表示
シミュレーション中またはシミュレーション後に結果の概要を表示するには,モデルウィンドウから,またはMATLABコマンドプロンプトで次を入力することによって电路范围ブロックを開きます。
open_system (“ee_push_pull_converter_ccm /范围/电路范围”);

シミュレーション中またはシミュレーション後に制御と誤差のデータを表示するには,モデルウィンドウからPI控制器范围ブロックを開くか,次のように入力します。
open_system (“ee_push_pull_converter_ccm /范围/ PI控制器范围”);

シミュレーション後にSimscape™結果エクスプローラーを使用してログに記録されたSimscapeデータを表示するには,次のように入力します。
sscexplore (simlog_ee_push_pull_converter_ccm);%

你也可以从以下列表中选择一个网站: