陆基雷达的MTI改进系数
本示例讨论了移动目标指示(MTI)改善系数,并研究了以下因素对MTI性能的影响:
频率
脉冲重复频率(PRF)
脉冲数
相干与非相干处理
这个例子还介绍了限制MTI消除的误差来源。最后,通过算例说明了陆基MTI雷达系统杂波噪声比(CNR)的提高。
MTI改善系数
在高层,有两种类型的MTI处理,相干MTI和非相干MTI。相干MTI指发射机在MTI消除器中使用的脉冲数上是相干的,或者系统接收机的相干振荡器锁定在发射机脉冲上,这也称为接收相干系统。a n非相干MTI系统使用杂波样本建立参考相位,根据该相位检测目标和杂波。
MTI改进系数 定义为
,
哪里 杂波功率是否输入接收器和接收器 是MTI处理后的杂波功率。
频率效应
使用以下方法研究频率对MTI性能的影响:mtifactor功能。使用500 Hz的脉冲重复频率(PRF),分析相干和非相干情况下的1到3延迟MTI对消器。
%设置参数m=2:4;%(m-1)延迟抵消器中的脉冲数freq=linspace(1e9,10E91000);%频率(Hz)prf=500;%脉冲重复频率(Hz)%初始化输出numM=numel(m);numFreq=numel(freq);ImCoherent=零(numFreq,numM);ImNoncoherent=零(numFreq,numM);%计算MTI改善系数与频率的关系对于im=1:numM%相干MTIImCoherent(:,im)=mtifactor(m(im),freq,prf,“IsCoherent”,对);%非相干MTIImNoncoherent (:, im) = mtifactor (m (im),频率,脉冲重复频率,“IsCoherent”,假);终止%绘图结果helperPlotLogMTI(m,freq,非相干,非相干);

从结果中可以得出几点结论。首先,在m = 3和4的情况下,在相同的m情况下,相干和非相干结果的差异随频率的增加而减小。对于m = 2的情况,结果表明,改善因子在较低的频率是非常相似的,但性能在较高的频率发散。其次,增加m可以改善相干和非相干MTI的杂波对消。第三,当PRF不变时,MTI改善因子随频率的增加而减小。最后,当m = 3和4时,相干性能优于非相干性能。
PRF效应
接下来,考虑PRF对MTI滤波器性能的影响,计算在1.5 GHz下的L波段频率的结果。
%设置参数m=2:4;%(m-1)延迟抵消器中的脉冲数频率=1.5e9;%频率(Hz)prf=linspace(10010001000);%脉冲重复频率(Hz)%计算MTI改善系数与PRF对于ImCoherent(:,im) = mtifactor(m(im),freq,prf,)“IsCoherent”,对);ImNoncoherent(:,im)=mtifactor(m(im),freq,prf,“IsCoherent”,假);终止%绘图结果helperPlotMTI(m,prf,非相干,非相干,“脉冲重复频率(Hz)”,“PRF与MTI改进”);

当频率保持不变时,有几个结果需要注意。首先,在m = 3和4的情况下,相同m的频率越高,相干改善因子和非相干改善因子的差异越大。m = 2病例的结果表明,改善因子与调查的大多数prf非常相似。其次,MTI性能随着PRF的增加而提高。最后,当m = 3和4时,相干性能优于非相干性能。
频率和PRF的综合效应
其次,考虑频率和PRF对MTI改善因子的综合影响。这将允许系统分析师更好地了解整个分析空间。使用3延迟抵消器对相干MTI系统进行计算。
%设置参数m=4;%(m-1)延迟抵消器中的脉冲数freq=linspace(1e9,10E9100);%频率(Hz)prf=linspace(1001000100);%脉冲重复频率(Hz)%初始化numFreq=numel(频率);numPRF=numel(prf);ImCoherentMatrix=0(numPRF,numFreq);%计算PRF范围内的相干MTI改善因子,并%频率对于ip = 1:numPRF ImCoherentMatrix(ip,:) = mtifactor(m,freq,prf(ip)),“IsCoherent”,对);终止%绘图结果helpPlotMTImatrix(m、频率、prf、ImCoherentMatrix);

请注意,此处显示了与前面所述相同的行为:
MTI性能随着PRF的增加而提高
MTI性能随频率的增加而降低
MTI性能限制
MTI处理基于接收窗口内目标和杂波平稳性的要求。当接收到连续回波并相互减去时,杂波被取消。任何抑制接收窗口内平稳性的影响,无论是雷达内部还是外部,都将导致不完全取消。
多种影响会降低MTI取消的性能。示例包括但不限于:
发射机频率不稳定性
脉冲重复间隔(PRI)抖动
脉宽抖动
量化噪声
雷达平台或杂波中的无补偿运动
接下来的两部分将讨论零速度误差和杂波频谱扩展的影响。
零速度误差
当杂波速度不以零速度为中心时,MTI性能下降。这些零速度误差的影响导致MTI改善因子降低,因为MTI滤波器零速度之外存在更多杂波能量。
考虑在下雨的环境中运行雷达的情况。雨杂波在接近或远离雷达系统时具有非零平均多普勒。除非检测到雨杂波的运动并对其进行补偿,否则MTI滤波的抵消效果会更差。
在本例中,假设以0多普勒为中心的零速度。对于相干MTI处理情况,研究在-20到20 m/s范围内给定杂波速度对改善因子的影响。
%设置参数m=2:4;%(m-1)延迟抵消器中的脉冲数clutterVels=linspace(-20,20100);%MTI零速度(m/s)nullVel=0;%真实杂波速度(m/s)频率=1.5e9;%频率(Hz)prf=500;%脉冲重复频率(Hz)%初始化numM=numel(m);numVels=numel(杂波电平);IMCONERCHERN=0(numVels,numM);IMNONCOCHERNET=nan(numVels,numM);%计算MTI改进系数对于im=1:numM对于iv=1:numVels ImCoherent(iv,im)=mtifactor(m(im),freq,prf,“IsCoherent”符合事实的“杂波速度”,杂波级(四),“零速度”, nullVel);终止终止%绘图结果nullError=(clutterVels-nullVel)。”;helperPlotMTI(m,nullError,ImCoherent,ImNoncoherent,“空错误(m/s)”,“零速度误差下的MTI改进”);
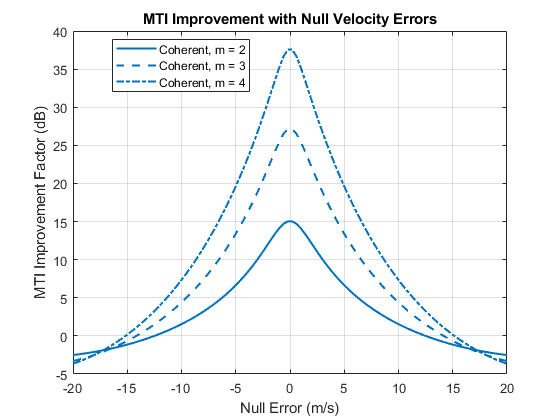
随着零误差的增加,相干MTI的改善速度迅速下降。在(m-1)延迟抵消器中,改进的速率随着脉冲数量的增加而增加。当m = 4时,仅1.1 m/s的微小偏移就会损失3 dB的改善因子。
杂波扩散
更宽的杂波扩展会导致MTI滤波器零点之外的杂波能量更多,从而导致杂波消除更少。虽然杂波扩展部分是由于杂波散射体的固有运动,但其他杂波扩展源可能是由于:
采样引起的相位抖动
相位漂移,这可能是由于相干本地振荡器的不稳定性造成的
雷达平台无补偿运动
考虑杂波扩展对MTI改善因子的影响。
%设置参数m=2:4;%(m-1)延迟抵消器中的脉冲数sigmav=linspace(0.1,10100);%杂波扩散的标准偏差(m/s)频率=1.5e9;%频率(Hz)prf=500;%脉冲重复频率(Hz)%计算MTI改进numSigma=numel(sigmav);对于im=1:numM对于is = 1:numSigma ImCoherent(is,im) = mtifactor(m(im),freq,prf,“IsCoherent”符合事实的“杂波标准偏差”sigmav(是));ImNoncoherent (im) = mtifactor (m (im),频率,脉冲重复频率,“IsCoherent”错误的“杂波标准偏差”sigmav(是));终止终止%绘图结果helperPlotMTI (m, sigmav ImCoherent ImNoncoherent,“杂波扩散的标准偏差(m/s)”,“MTI改进与杂波传播”);

从图中可以看出,无论MTI是相干的还是非相干的,杂波扩展的标准偏差都是MTI改善的一个很大的限制因素。随着杂波扩展标准偏差的增加,MTI改善因子显著降低,直到所有值的改善都降到5 dB以下在相干和非相干情况下,m的平均值。
陆基MTI雷达杂波分析
考虑陆基MTI雷达系统,在不进行MTI处理的情况下,计算杂波噪声比。
首先,设置雷达和MTI处理参数。
%雷达特性频率=1.5e9;%L波段频率(Hz)anht=15;%高度(米)ppow=100e3;%峰值功率(W)tau=1.5e-6;%脉冲宽度(秒)prf=500;%脉冲重复频率(赫兹)Gtxrx=45;%发送/接收增益(dB)Ts = 450;%噪声系数(dB)Ntx=20;%发射脉冲数%MTI设置nullVel=0;%零速度(m/s)m=4;%(m-1)延迟抵消器中的脉冲数N = Ntx - m;%相干积分脉冲数
考虑一个树木丛生的丘陵环境,杂散度为1米/秒,平均杂波速度为0米/秒。计算和绘制陆面反射率的放牧角的定义几何。landroughness和landreflectivity分别用于物理表面特性和反射率计算的函数。
%杂波特性sigmav=1;%杂波扩散的标准偏差(m/s)clutterVel = 0;%杂波速度(m/s)landType =“树木繁茂的小山”;%得到高度(m)、表面坡度(deg)的表面标准偏差,%和植被类型[表面粗糙度,beta0,植被类型]=土地粗糙度(土地类型);%计算模拟的最大范围Rua=时间2范围(1/prf);最大无歧义范围(m)Rhoriz=水平范围(anht,“浮力”, surfht);%水平距离(m)RhorizKm = Rhoriz。* 1 e - 3;%地平线范围(公里)征求= min (Rua Rhoriz);%最大范围(m)%生成用于模拟的范围向量Rm=linspace(100,Rmax,1000);%射程(米)Rkm=Rm*1e-3;%范围(公里)计算地面杂波反射率grazAng = grazingang (anht, Rm,“目标之光”,surfht);nrcs=土地反射率(土地类型,grazAng,频率);nrcsdB=pow2db(nrcs);helperPlot(grazAng,nrcsdB,“NRCS”,“NRCS(dB)”,'反射率\sigma_0(dB)',“陆地反射率\sigma\u 0”);

然后,利用该方法计算杂波的雷达截面(RCS)杂波器函数。注意当雷达到达地平线范围时杂波RCS的下降。
%计算方位角和仰角波束宽度azbw = sqrt(32400 / db2pow(Gtxrx));elbw = azbw;计算杂波RCSrcs=杂波表面ERCS(nrcs、Rm、azbw、elbw、grazAng(:),tau);%绘制包括地平线的杂波RCSrcsdB=功率2db(rcs);%转换为分贝进行绘图hAxes=帮助程序包(Rkm、rcsdB、,“RCS”,“行驶里程(km)”,“杂乱RCS (dBsm)”,“杂波雷达散射截面(RCS)”); helperAddHorizLine(hAxes,RhorizKm);

由于传播路径偏离自由空间,因此在计算中包括杂波传播因子和大气损耗。
基础的默认介电常数计算雷达反射因子函数是一个海水模型。为了更准确地模拟陆地上的传播路径,使用地表电阻率函数。
%计算植被的地表介电常数温度=20;%环境温度(C)wc=0.5;%重量含水率epsc=地表电阻率(“植被”,频率,温度,工作时间);
使用雷达反射因子功能。在计算中包括植被类型。在较高频率下,植被的存在可能会导致额外损失。
计算杂波传播因子Fc = radarpropfactor (Rm,频率、anht surfht,...“表面重量标准偏差”,surfht,...“表面坡度”,beta0,...“VegetationType”,素食型,...“表面相关性许可”,epsc,...“提升波束宽度”,elbw);helperPlot(Rkm,Fc,“杂波传播因子”,“行驶里程(km)”,...'传播因子(dB)',...“单向杂波传播因子F_C”);

接下来,在此模拟中计算大气损耗。假设默认标准大气。使用对流层函数。
%计算因水和氧衰减造成的大气损失elAng=高度2el(表面、非表面、Rm);%仰角(度)元素个数=元素个数(elAng);躺= 0(元素个数,1);Llens = 0(元素个数,1);对于ie=1:numEl Latmos(ie,:)=tropopl(Rm(ie),freq,anht,elAng(ie));终止hAxes=帮助程序包(Rkm、Latmos、,“大气损耗”,“行驶里程(km)”,‘损耗(dB)’,“单向大气损失”);ylim(hAxes[0.1]);

使用以下公式计算CNR:雷达信噪比功能和绘图结果有或没有MTI。再次注意,当模拟距离接近雷达视界时CNR的下降。
%计算CNRλ= freq2wavelen(频率);中国北车= radareqsnr(λ,Rm (:), ppowτ,...“收益”Gtxrx,“rcs”,rcs,“t”,Ts,...“传播因子”,Fc,...“大气损耗”,拉特莫斯);相干增益=pow2db(N);cnr=cnr+相干增益;hAxes=帮助程序包(Rkm、cnr、,“CNR”,“行驶里程(km)”,“中国北车(dB)”,“CNR杂波噪声比”); helperAddHorizLine(hAxes,RhorizKm);%用MTI计算CNRIm=MTI因子(m、频率、prf、,“IsCoherent”符合事实的...“杂波速度”,杂乱无章,...“杂波标准偏差”,sigmav,...“零速度”,nullVel)
Im=55.3986
cnrMTI=cnr-Im;helperAddPlot(Rkm、cnrMTI、,“CNR+MTI”,hAxes);
最后,在杂波真实速度为3 m/s且零速度以0 m/s为中心的情况下,假设存在零误差,计算MTI改进因子。
%用零速度误差计算CNRtrueClutterVel = 3;%杂波速度(m/s)nullError=trueClutterVel-nullVel;%空错误(m/s)ImNullError=mtifactor(m、频率、prf、,“IsCoherent”符合事实的...“杂波速度”trueClutterVel,...“杂波标准偏差”,sigmav,...“零速度”,nullVel)
ImNullError=33.6499
cnrMTINullError = cnr - ImNullError;helperAddPlot (Rkm cnrMTINullError,...斯普林特('带%.1f(m/s)空错误的CNR+MTI',零错误),...哈克斯);

ImLoss = Im - ImNullError
ImLoss = 21.7488
注意,由于MTI处理,CNR急剧下降。当零速度设置为杂波速度时,改善了55 dB。当有一个无补偿运动时,抵消减小到34 dB。这是21分贝的消去。这表明需要适当地补偿运动或引导零到适当的速度。
总结
本例讨论了MTI改进因子,并研究了对MTI性能的多种影响mtifactor功能,我们看到MTI性能:
随着PRF的增加而改善
随着频率的增加而减少
随着(m-1)延迟抵消器中脉冲数的增加而改善
此外,我们还发现相干MTI的性能通常优于非相干MTI。
最后,我们研究了陆基MTI雷达系统中MTI性能的局限性,表明需要适当补偿意外杂波速度。
参考文献
巴顿,大卫·诺克斯。现代雷达的雷达方程《Artech House雷达系列》。马萨诸塞州波士顿:Artech House,2013年。
理查兹硕士,吉姆·希尔,威廉·霍尔姆和威廉·梅尔文主编。现代雷达原理罗利,北卡罗来纳州:科技出版社,2010年。
函数helperPlotLogMTI(m、频率、非相干、非相干)%用于具有对数x轴的MTI图hFig=图形;hAxes=轴(hFig);线型={'-','--','-.'};numM =元素个数(m);对于im = 1:numM semilogx(hax,freq.*1e-9,ImCoherent(:,im),“线宽”,1.5,...“线型”,线型{im},“颜色”[0, 0.4470 - 0.7410),...“显示名称”,斯普林特('连贯,m=%d',m(im))保持(hAxes,“开”)半对数x(hax,频率*1e-9,im非相干(:,im),“线宽”,1.5,...“线型”,线型{im},“颜色”,[0.8500 0.3250 0.0980],...“显示名称”,斯普林特('非相干,m=%d', m (im)))终止网格(hax,“开”);xlabel(hAxes,‘频率(GHz)’)伊拉贝尔(哈克斯,“MTI改善系数(dB)”)头衔(“频率vs MTI改善”)传说(哈克斯,“位置”,“最好的”)终止函数helperPlotMTI(m,x,非相干,非相干,xLabelStr,titleName)%用于以线性单位表示x轴的MTI绘图hFig=图形;hAxes=轴(hFig);线型={'-','--','-.'};numM =元素个数(m);对于im = 1:numM plot(hax,x,ImCoherent(:,im),“线宽”,1.5,...“线型”,线型{im},“颜色”[0, 0.4470 - 0.7410),...“显示名称”,斯普林特('连贯,m=%d',m(im))保持(hAxes,“开”)如果任何(~isnan(非相干))%如果是NaN,不要策划情节(hax x, ImNonCoherent (:, im),“线宽”,1.5,...“线型”,线型{im},“颜色”,[0.8500 0.3250 0.0980],...“显示名称”,斯普林特('非相干,m=%d', m (im)))终止终止网格(hax,“开”);xlabel(hAxes,xLabelStr)ylabel(hAxes,“MTI改善系数(dB)”)标题(标题名)图例(哈克斯、,“位置”,“最好的”)终止函数helpPlotMTImatrix(m、频率、prf、ImMat)%在x轴和x轴上创建MTI改善系数的图像% PRF在y轴上hFig=数字;hAxes=轴(hFig);hP=pcolor(哈克斯,频率*1e-9,prf,ImMat);hP.EdgeColor=“没有”;xlabel(hAxes,‘频率(GHz)’)伊拉贝尔(哈克斯,‘脉冲重复频率(Hz)’)头衔(斯普林特)('相干MTI改进,m = %d',m))hC=颜色条;hC.Label.String="(dB)";终止函数varargout=helperPlot(x,y,displayName,xlabelStr,ylabelStr,titleName)%用于CNR分析%创建新图形hFig =图;hax =轴(hFig);%密谋绘图(hax,x,y,“线宽”,1.5,“显示名称”,显示名称);网格(hAxes,“开”);保持(哈克斯,“开”); xlabel(hAxes,xlabelStr)ylabel(hAxes,ylabelStr);头衔(哈克斯,头衔名称);ylims=get(hAxes,“Ylim”);集(hax,“Ylim”,[-100ylims(2)];%添加图例传说(哈克斯,“位置”,“最好的”)%输出轴如果nargout~=0 varargout{1}=hAxes;终止终止函数helperAddPlot(x,y,displayName,hax)%添加其他CNR图绘图(hax,x,y,“线宽”,1.5,“显示名称”,显示名称);终止函数helperAddHorizLine(哈克斯,瓦尔)添加指示水平距离的垂线xline(哈克斯、瓦尔、,'--',“显示名称”,“地平线范围”,“线宽”,1.5);终止
你也可以从以下列表中选择一个网站: