模拟被动雷达传感器和雷达干扰
此示例显示了如何模拟和模拟使用的动态和无源雷达传感器的输出radarDataGenerator.在本例中,您将观察射频(RF)干扰如何影响雷达的探测性能。此外,还可以使用被动雷达传感器来估计射频干扰的位置和类型。
创建场景
评估雷达的跟踪性能需要对无线电频率(RF)场景建模。建模流程如下:
产生射频排放。
传播排放并反映平台的排放。
接收排放,计算干扰损失并生成检测。
在本例中,您使用一个由三个平台组成的场景来执行这些步骤:
空中平台以每小时500公里的速度从场景底部向北飞行
机载平台以每小时600公里的速度从场景顶部向南飞行
在场景中间飞行以700 km / h飞行的机载平台
首先,创建场景并设置场景持续时间,然后创建三个机载平台。
场景=雷达场景;scene.StopTime=10;%%平台1:以500 km/h的速度空降和北行SPD = 500 * 1E3 / 3600;% m / sWP1 = [0 0 -6000];wp2 = [spd * scene.stoptime 0 -6000];toa = [0;scene.StopTime];平台(场景,“轨迹”,WayPointTrajectory('waypoints', (wp1;wp2),'抵达时间'toa));%平台2:机载和南行600 km / h社民党= 600 * 1 e3/3600;% m / swp1 = [30 e3 +社民党*的场景。StopTime 0 -6000];Wp2 = [30e3 0 -6000];toa = [0;scene.StopTime];平台(场景,“轨迹”,WayPointTrajectory('waypoints', (wp1;wp2),'抵达时间'toa));3号平台:空降东行,时速700公里spd=700*1e3/3600;% m / sWp1 = [10e3 1e3 -6000];Wp2 = [10e3 1e3+spd*场景。StopTime -6000);toa = [0;scene.StopTime];平台(场景,“轨迹”,WayPointTrajectory('waypoints', (wp1;wp2),'抵达时间'toa));
使用剧情创建一个显示场景中的平台及其轨迹的显示。
ax =轴;theaterDisplay = theaterPlot ('父母',斧头,“AxesUnit”,[“公里”“公里”“公里”],“XLim”,[ - 10000 40000],“YLim”, [-20000 20000],“ZLim”(1) e7 1 e7));视图(-90 [90])%交换x和y轴补丁('xdata',[-10000 -10000 40000 40000],“YData”,[ - 20000 20000 20000 -20000],“EdgeColor”,“没有”,“FaceColor”(0.8 0.8 0.8),'显示名称',“地面”); 平板绘图仪=平板绘图仪(剧院显示器,'显示名称',“平台”,“MarkerFaceColor”,“k”);plotPlatform (platPlotter vertcat (scene.platformPoses.Position));trajPlotter = trajectoryPlotter (theaterDisplay,'显示名称','轨迹',“线条样式”,“- - -”);alltrajectory = cellfun(@(x) x. trajectory . lookuppose (linspace(0,scene. stoptime,10)),平台,'统一输出',false);绘制轨迹(轨迹记录器,所有轨迹);

存在干扰发射时的雷达探测
通常,雷达工作在其他不需要的射频发射干扰雷达发射的波形的环境中。当这种情况发生时,雷达在干扰信号方向的检测性能下降。将射频发射器连接到场景底部的平台(第一个平台),将雷达连接到场景顶部的平台(第二个平台)。
创建射频发射器
模型射频发射使用雷达汇款器目标。发射器处于向前看的配置中,方位角视野为20度,以包括场景中的其他两个平台。有效各向同性辐射功率(EIRP)设置干扰信号的强度。波形类型是用户定义的值,用于枚举场景中存在的各种波形类型。对于此场景,使用值0表示噪声波形类型。
%创建干扰发射器。rfEmitter = radarEmitter (1,'没有扫描',......“FieldOfView”,[20 5],......% [z el] deg“附近”, 200,......%dBi“CenterFrequency”300 e6,......%赫兹“带宽”, 30 e6,......%赫兹“WaveformType”,0)%使用0表示类似噪音的排放
RFEMITTER =具有属性的RADAREMITTER:emitterIndex:1 updaterate:1 scanmode:'无扫描'inutinginglocation:[0 0] mountingangles:[0 0] fieldofview:[2x1 double]机械:0 lookangle:0 haselevation:0 eirelavation:0中心频率:300000000带宽:30000000波形型:0 ProatchingGain:0
将发射器连接到第一个平台。
platEmit = scene.Platforms {1};platEmit。发射器= rfEmitter
platEmit=具有属性的平台:PlatformID:1 ClassID:0位置:[0 0-6000]方向:[0 0 0 0]维度:[1x1结构]轨迹:[1x1航路点轨迹]位置估计器:[1x1 InSensor]发射器:{[1x1 RadaTransmiter]}传感器:{}签名:{[1x1 rcsSignature]}
创建单站雷达
为第二个平台配备单基地雷达。使用radarDataGenerator模拟这种类型的雷达。首先,创建一个单体雷达使用radarDataGenerator.配置雷达的安装方向,以便它扫描平台前面的方位角扇区。启用INS输入,以便雷达可以使用平台的姿态估计器以场景坐标输出检测结果。启用干扰输入端口,使上面发射器产生的干扰信号可以传递给雷达。
雷达= radarDataGenerator (2“部门”,......'检测码',“单站”,......'updaterate', 12.5,......%赫兹“FieldOfView”, [2 10]);% [z el] deg雷达。安装角度= [0 0 0];%[z y x] deg雷达。之内= true;雷达。InterferenceInputPort = true;雷达。DetectionCoordinates =“场景”
雷达= radardatagenerator具有属性:SensorIndex:2 Updaterate:12.5000检测码:'单体'扫描码:'机械'扫描仪:1 exisionsInputport:0 mountingLocation:[0 0] Mountingangles:[0 0] FieldOfView:[2 10] rantanimits:[0 100000]检测可力:0.9000 falsealrate:1.0000E-06引用管理:100000 TargetReportFormat:'群集检测'显示所有属性
把雷达安装在第二个平台上。
platRadar=scene.Platforms{2};平台雷达。传感器=雷达;
更新显示以显示场景中的平台、雷达和发射器。
Emittercolor = [0.9290 0.6940 0.1250];radarcolor = [0 0.4470 0.7410];platemitplotter = platformplotter(theaterdisplay,'显示名称','rf发射器',“标记”,' d ',“MarkerFaceColor”,发射极颜色);平板绘图仪=平板绘图仪(剧院显示器,'显示名称',“单站雷达”,“标记”,' d ',“MarkerFaceColor”, radarColor);platPlotter。DisplayName =“目标”;clearData (platPlotter);covPlotter = coveragePlotter (theaterDisplay,'Α', 0.2 [0]);detPlotter = detectionPlotter (theaterDisplay,'显示名称',雷达信号检测的,“MarkerFaceColor”, radarColor);标题(“用干扰发射器进行雷达探测”);plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);Plotcoverage(Covplotter,CoverageConfig(场景),[-1 2],{EmitterColor,Radarcolor};

在上图中,前视雷达所在平台用蓝色菱形表示,雷达当前视场为来自平台的蓝色区域。在图的底部,携带干扰射频发射的平台显示为黄色菱形,发射体的电流视场为相应的黄色区域。没有任何发射器或传感器的平台被称为目标并显示为黑色三角形。
模拟单站检测
在多速率场景中,您可以找到一个更新速率,它是场景中定义的所有传感器和发射器速率的公共分压器,或者您可以使用连续更新,它会在您调用时自动将场景推进到下一个有效更新时间推进.
现场。UpdateRate = 0
scene=radarScenario,属性:IsEarthCenter:0更新率:0模拟时间:0停止时间:10模拟状态:未启动平台:{1x3单元}
对于下面循环中的每一步,使用:
推进根据其轨迹移动所有平台。发出更新来自的排放物的传输方向platEmit.传播将排放直接传播到位于发射器视场内的场景中的每个平台。每个接收到直接路径发射的平台生成一个单反射反射,该反射反射也作为反射发射传播到每个其他平台。检测从在platRadar.
下图显示了从发射器到雷达传感器的辐射传播。

%设置可重复结果的随机种子。rng (2018);plotdets = {};而推进(场景)%发出RF信号。txemiss =发射(场景);%反映场景中平台发出的信号。reflEmiss=传播(场景,txEmiss);%从单基地雷达传感器产生探测。[DETS,CONFIG] =检测(场景,RELTEMISS);每次雷达完成扇区扫描时重置探测。如果config.IsScanDone% 重启plotdets = dets;其他的%缓冲区plotDets=[plotDets;dets];% #好< AGROW >结束%更新显示与当前平台位置,波束位置和检测。plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);Plotcoverage(Covplotter,CoverageConfig(场景),[-1 2],{EmitterColor,Radarcolor};如果~isempty(plotDets)allDets=[plotDets{:}];%提取测量位置的列向量meas = [alldets.measurent]';plotdetection(剥离剂,meas);结束结束

前面的图表明,雷达(蓝色显示)只能在场景中间检测目标。探测显示为蓝色填充圆圈,并在雷达视场(即波束宽度)扫过目标时进行。但是,当雷达波束扫过发射平台(显示为黄色)时,不会产生检测,因为该平台产生的干扰阻止雷达检测。
射频发射的被动检测
在前一节中,雷达无法探测到发射平台的位置,因为该平台的辐射掩盖了雷达自身的辐射。然而,这种强烈的辐射可以被侦听射频发射的被动传感器检测和识别。这些传感器通常被称为电子支持措施(ESM)。金宝app这些传感器通常监听广泛的频率范围,并试图识别独特的发射器,这些发射器的发射到达的方向,以及发射器使用的波形类型。
创建ESM传感器
重复使用上一节中的场景,但将第一个平台上的单基地雷达替换为ESM传感器。使用radarDataGenerator对ESM传感器进行建模,并确保将传感器配置为其中心频率和带宽包括发射器的射频频谱。否则,它将无法检测发射器。
重启(现场);esm = radarDataGenerator (1,'没有扫描',......'检测码',ESM的,......'updaterate', 12.5,......%赫兹“MountingAngles”,[0 0 0],......%[z y x] deg“FieldOfView”,[30 10],......% [z el] deg“CenterFrequency”300 e6,......%赫兹“带宽”, 30 e6,......%赫兹“WaveformTypes”,0,......%检测干扰波形类型“之内”,真的)
esm=具有以下属性的雷达数据生成器:传感器索引:1发射器索引:1更新率:12.5000检测模式:“esm”扫描模式:“无扫描”装载位置:[0 0 0 0]装载角度:[0 0]视野:[30 10]错误报警率:1.0000e-06显示所有属性
将第二平台上的雷达更换为ESM传感器。
platESM = scene.Platforms {2};platESM。传感器= esm;
相应地更新可视化。
platRadarPlotter。DisplayName =“ESM传感器”;esmColor = [0.4940 0.1840 0.5560];platRadarPlotter。MarkerFaceColor = esmColor;%使用辅助对象添加仅角度检测绘图仪删除(detPlotter);esmDetPlotter = helperAngleOnlyDetectionPlotter (theaterDisplay,'显示名称',“ESM检测”,“颜色”esmColor,“线条样式”,“- - -”);clearData (covPlotter);plotCoverage(covPlotter, coverageConfig(scene), [-1 1], {emitterColor, esmColor});标题(“射频发射的被动检测”);

在上图中,雷达被安装在第二个平台上的ESM传感器所取代。ESM传感器的视场显示为洋红色,包括发射平台和目标平台。
模拟ESM信号检测
现在用ESM传感器代替雷达来模拟探测。请注意,由于ESM传感器是被动传感器,它不能定位发射平台,但指示平台发射的到达方向。这些只有角度的探测显示为从ESM传感器向发射平台发出的射线。
%设置可重复结果的随机种子。rng(2018);plotDets={};snap=[];而推进(场景)%发出RF信号。txemiss =发射(场景);%反映场景中平台发出的信号。reflEmiss=传播(场景,txEmiss);%从ESM传感器生成检测。[DETS,CONFIG] =检测(场景,RELTEMISS);每次雷达完成扇区扫描时重置探测。如果config.IsScanDone% 重启plotdets = dets;其他的%缓冲区plotDets=[plotDets;dets];% #好< AGROW >结束%更新显示当前平台位置,光束位置和检测。plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);plotCoverage(covPlotter, coverageConfig(scene), [-1 1], {emitterColor, esmColor});plotDetection (esmDetPlotter plotDets);%在t = 2秒时记录反射检测。= getSnap(ax,场景。SimulationTime 2吸附);drawnow结束标题(“由ESM传感器检测到的射频发射器”);

ESM传感器检测射频发射并估计其到达方向。该估计值由源自传感器且靠近发射器的品红线显示。角度估计值有噪声,这就是为什么该线不直接通过发射器位置的原因。
ESM传感器在其报告的检测中对波形类型进行分类。对于这个发射器,它报告发射器使用的噪声波形类型:0。
依据{1}。ObjectAttributes {1}
ans =结构体字段:目标指数:1发射指数:1波形类型:0信噪比:184.8224
注意,传感器检测到的发射信号的信噪比(SNR)非常大,为185 dB。由于射频发射器具有较高的功率,ESM传感器也可以检测发射波形对目标的反射。这是在模拟2秒后看到的,当目标位于发射器的视场内。
图;imshow(snap.cdata);标题(“ESM传感器探测发射器和目标”);

上图显示了发射体和目标都检测到的辐射,因为目标从发射体接收能量并将该波形重新发射回场景,导致ESM传感器也检测到它。
单基地雷达的被动探测
单体雷达也会发出波形进入场景。有时需要对这些排放的被动检测。为此,您必须单独模拟雷达的发射和传感部分。发射器生成成为场景射频排放的一部分的波形。然后可以由其他传感器(例如ESM传感器)检测这些波形。
重用前面的相同场景。对于该方案,在方案顶部(第二个平台)的平台上安装一个单站雷达,并在方案底部(第一个平台)的平台上安装一个ESM传感器。中间平台仍然是目标,没有安装发射器或传感器。
重启(现场);
通过对传感器的发射和传感部分建模,创建一个单基地雷达。使用雷达汇款器为单站雷达发射器建模。在这种情况下,使用1表示该雷达使用的波形类型。波形类型是用户定义的枚举,用于表示场景中模拟的不同类型的波形。波形枚举使发射器和传感器知道如何处理这些波形以生成数据检测。例如,如果发射器的波形类型为1,且传感器在其波形列表中包含该类型,则传感器知道如何处理发射器的发射(例如,使用匹配滤波器),并实现与该波形相关的处理增益。
为单基地雷达创建发射器。radarTx = radarEmitter (2“部门”,......'updaterate', 12.5,......%赫兹“MountingAngles”,[0 0 0],......%[z y x] deg“FieldOfView”, 10 [2],......% [z el] deg“CenterFrequency”300 e6,......%赫兹“带宽”, 3 e6,......%赫兹“ProcessingGain”, 50岁,......% D b“WaveformType”,1)%使用1表示该雷达的波形。
radarTx = radarEmitter属性:EmitterIndex: 2 UpdateRate: 12.5000 ScanMode:“机械”MountingLocation: [0 0 0] MountingAngles: [0 0 0] FieldOfView: [2 x1双]MaxMechanicalScanRate: 75 MechanicalScanLimits: 45 [-45] MechanicalAngle: 0 LookAngle: 0 HasElevation: 0附近:100 CenterFrequency: 300000000带宽:3000000 WaveformType:1 ProcessingGain: 50
使用radarDataGenerator为场景中接收射频发射的雷达传感部分建模,识别与单基地发射器的波形类型对应的发射,并从这些接收的发射产生检测。与发射器的波形类型不匹配的发射被视为干扰。
当使用radarDataGenerator要对单基地雷达的感应部分建模,请设置DetectionMode属性的传感器单声道.这告诉传感器在处理所接收的RF发射时使用发射器的配置。这EmissionsInputPort属性也必须设置为true以启用检测radarEmission对象。
radarRx = radarDataGenerator (2......'检测码',“单稳态”,......“EmissionsInputPort”,真的,......'emitterindex',radarTx.EmitterIndex,......“之内”,真的,......'检测',“情景”)
radarx = radardatgenerator with properties: SensorIndex: 2 EmitterIndex: 2 DetectionMode: 'Monostatic' InterferenceInputPort: 0 EmissionsInputPort: 1 RangeLimits: [0 100000] FalseAlarmRate: 1.0000e-06显示所有属性
将雷达发射器和传感器连接到第二个平台上。
platRadar = scene.Platforms {2};platRadar。发射器= radarTx;platRadar。传感器= radarRx;
重用以前的ESM传感器,但设置ESM传感器的已知波形类型列表,以包括雷达发出的波形。如果ESM传感器不知道雷达的波形类型,它将不会被检测到。
%将雷达的波形添加到ESM传感器的已知波形类型列表中。esm。WaveformTypes = [0 1];%将ESM传感器安装到第一个平台上。platESM = scene.Platforms {1};platESM。发射器= {};%拆下发射器。platESM。传感器= esm;
更新显示屏以显示单体检测和ESM检测。
detPlotter = detectionPlotter (theaterDisplay,'显示名称',雷达信号检测的,“MarkerFaceColor”, radarColor);platRadarPlotter。DisplayName =“单站雷达”;platradarplotter.MarkerfaceColor =雷达彩色;platemitplotter.displayname =.“ESM传感器”;platEmitPlotter。MarkerFaceColor = esmColor;clearData (esmDetPlotter);clearData (covPlotter);covcon = coverageConfig(现场);plotCoverage(covPlotter, covcon([1 3]), [1 -2], {esmColor, radarColor});标题(ax,“单基地雷达的被动探测”);

上图显示了雷达在其平台前扫描方位扇区,其中包括目标平台以及携带ESM传感器的平台。当雷达的视场(以蓝色显示)扫过这两个平台的位置时,雷达产生了对这两个平台的探测。然而,当雷达波束经过ESM传感器的位置时,ESM传感器检测到雷达,并从传感器绘制一条线来指示估计的位置。
%设置可重复结果的随机种子。rng (2018);平台= scene.Platforms;numPlat =元素个数(平台);plotDets = {};提前= [];而推进(场景)%发出RF信号。[txemiss,txconfigs] =发射(场景);%反映场景中平台发出的信号。reflEmiss=传播(场景,txEmiss);%生成传感器的检测。[dets, config] =检测(scene, reflEmiss, txConfigs);每次雷达完成扇区扫描时重置探测。如果txConfigs(结束)。IsScanDone% 重启plotdets = dets;其他的%缓冲区plotDets=[plotDets;dets];% #好< AGROW >结束%更新显示当前平台位置,光束位置和检测。plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);covcon = coverageConfig(现场);plotCoverage(covPlotter, covcon([1 3]), [1 -2], {esmColor, radarColor});plotDetection (esmDetPlotter plotDets);plotMonostaticDetection (detPlotter plotDets);%在t = 5.6秒时记录反射探测。snap=getSnap(ax,scene.SimulationTime,5.6,snap);刷新屏幕结束

单基地雷达的探测模型使用雷达汇款器和radarDataGenerator在目标和装有ESM传感器的平台附近显示为填充的蓝色圆圈。ESM传感器也能够检测雷达,正如从ESM传感器和通过雷达平台附近的线显示的仅角度检测所示。
图;imshow(snap.cdata);标题(“ESM传感器探测到的雷达和目标”);
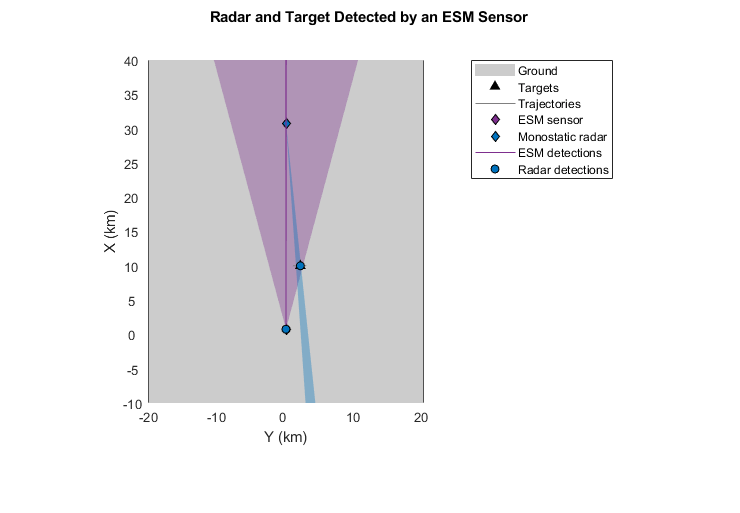
由于雷达排放的高功率(EIRP),所发射的能量被反映为ESM平台的目标。因此,当目标仍在ESM传感器的视野中仍然在目标平台上扫过目标平台时,ESM传感器检测到目标平台。
金宝app支持功能
getSnap在给定的快照时间记录轴的快照。
函数snap = getsnap(hax,curtime,snaptime,prevsnap)如果~isempty(prevSnap) snap = prevSnap;elseifcurTime>=快照时间(&curTime<快照时间+0.05 hAx.Title.Visible=“关”;提前= getframe (hAx.Parent);hAx.Title.Visible =“上”;其他的提前= [];结束结束
plotMonostaticDetection解析检测,以绘制单个检测detectionPlotter.
函数plotMonostaticDetection(绘图仪,依据)如果~ isempty(依据)%只对detectionPlotter进行单静态检测radardetid = cellfun(@(x)x.sensorindex == 2,dets);如果任何(radarDetId)%单基地雷达测量位置的提取radarDets=[dets{radarDetId}];meas=[radarDets.MEASURATION];绘图仪检测(绘图仪,meas);结束结束结束
你也可以从以下列表中选择一个网站: