斜视聚束合成孔径雷达(SAR)成像
这个例子展示了如何使用线性调频(LFM)波形对基于聚光灯的合成孔径雷达(SAR)系统建模。在斜视模式下,SAR平台可以根据需要从侧面向前或向后倾斜一定角度。斜视模式有助于成像区域位于当前雷达平台位置的前面,或成像位置位于干涉测量应用平台位置的后面。由于距离-方位耦合,斜视模式的挑战更高。由于SAR的分辨率取决于信号和天线配置,因此分辨率可以比基于视觉的成像系统高得多。本例使用聚束模式,执行距离偏移算法[1,3],对位于SAR平台位置前面的静止目标成像。线性调频波形在相当低的发射功率下提供了大的时间带宽产品的优势,使其适合在机载系统中使用。有关本示例中使用的术语的详细信息,请参见条带地图合成孔径雷达(SAR)成像.

雷达的配置
考虑采用4 GHz载频和50 MHz信号带宽的C波段机载SAR。该带宽产生3米的距离分辨率。如上图所示,雷达系统从侧面以33度的斜视角收集数据。延迟通常对应于目标和平台之间的倾斜范围。对于SAR系统,当平台穿过与天线波束方向正交的路径时,倾斜范围将随时间变化。下面这一节重点介绍定义传输波形的参数。LFM扫描带宽可根据所需的距离分辨率确定。
c=物理常数(“光速”);
设置SAR中心频率。
fc=4e9;%赫兹
将所需的范围和交叉范围分辨率设置为3米。
rangeResolution = 3;%仪表crossRangeResolution = 3;%仪表
信号带宽是由所需的距离分辨率得到的参数。
bw=c/(2*范围分辨率);prf=1000;%赫兹孔径=4;%平方米兼总经理= 3 * 10 ^ 6;%交会fs=120*10^6;%赫兹
配置雷达的线性调频信号。
波形=相控.LinearFMWaveform(“采样器”,财政司司长,“脉冲宽度”,tpd,“PRF”,prf,...“扫频带宽”,体重);
假设飞机速度为100米/秒,飞行持续时间为4秒。
速度= 100;%米/秒飞行持续时间=4;%交会radarPlatform =分阶段。平台(“初始位置”(0, -600, 500),“速度”,[0;速度;0]);慢时间=1/prf;numpulses=flightDuration/slowTime+1;eta1=linspace(0,flightDuration,numpulses)';最大范围=2500;truncrangesamples=ceil((2*maxRange/c)*fs);fastTime=(0:1/fs:(trunRangeSamples-1)/fs);%设置交叉范围处理的参考范围。Rc=1e3;%仪表
配置合成孔径雷达发射机和接收机。天线朝向与飞行方向正交的侧面方向。
天线=相控余弦天线元件(“FrequencyRange”[1 e9 6 e9]);antennaGain = aperture2gain(孔径、c / fc);发射机=分阶段。发射机(“峰值功率”1 e3,“收益”,天线;散热器=相控散热器(“传感器”、天线、“OperatingFrequency”足球俱乐部,“PropagationSpeed”,c);收集器=相控收集器(“传感器”、天线、“PropagationSpeed”C“OperatingFrequency”,fc);接收器=相控。接收器前置放大器(“采样器”fs,“噪音图”, 30);
配置传播通道。
通道=相控。自由空间(“PropagationSpeed”C“OperatingFrequency”足球俱乐部,“采样器”fs,...“TwoWayPropagation”,对);
场景配置
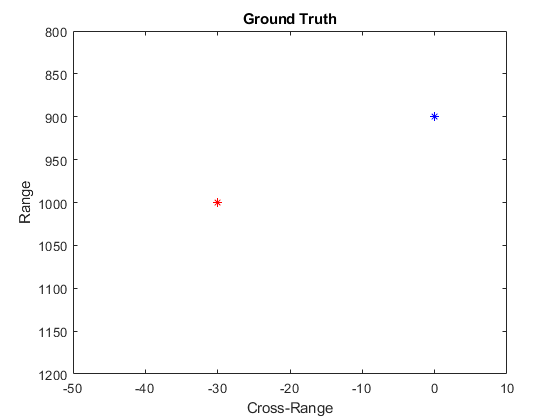
在本例中,在下面指定的位置配置了两个静态点目标。模拟中进一步显示的整个场景位于平台前面。数据采集在机载平台与目标位置并排之前结束。所有目标的平均RCS值为1平方米。
targetpos=[900,0,0;1000,-30,0];targetvel=[0,0,0;0,0,0];
斜视角的计算取决于飞行路径和目标场景的中心,在这种情况下,目标场景位于近950米处。
斜角=atand(600/950);目标=相位。雷达目标(“OperatingFrequency”足球俱乐部,“MeanRCS”,[1,1]);点目标=分阶段平台(“初始位置”targetpos,“速度”, targetvel);%下图描述了基于目标的地面真相%地点。图(1);h=轴;绘图(targetpos(2,1),targetpos(1,1),“*b”);所有;绘图(targetpos(2,2)、targetpos(1,2),“*r”);从;集(h,“伊迪尔”,“反向”);xlim([-50 10]);ylim([800 1200]);标题(“地面实况”); ylabel (“范围”);xlabel(“横向距离”);
合成孔径雷达信号仿真
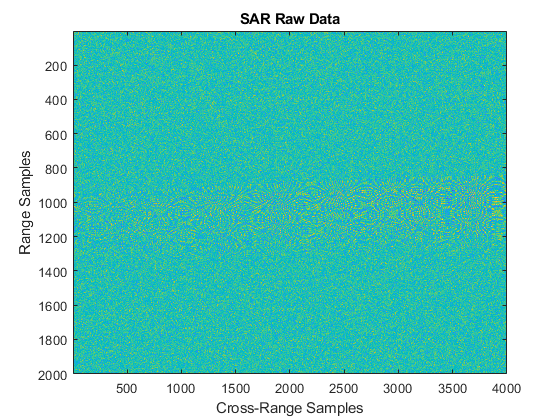
下一节描述了系统如何基于上述配置进行操作。具体而言,下一节说明了SAR平台如何进行数据采集。当平台在横向范围内移动时,脉冲在相对于飞行轨迹的斜视角定义的方向上传输和接收。a脉冲采集给出了平台移动时位于照明区域的目标的相位历史。目标位于照明区域的时间越长,整个图像的横向分辨率越好,因为整个场景的横向和横向聚焦过程是通用的。
rxsig = 0 (truncrangesamples numpulses);对于ii=1:单位脉冲%更新雷达平台和目标位置[radarpos,radarvel]=雷达平台(慢时间);[targetpos,targetvel]=点目标(慢时间);%获取点目标的范围和角度[targetRange,targetAngle]=射程角(targetpos,radarpos);%产生线性调频脉冲sig=波形();只使用能覆盖目标的脉冲长度。团体=团体(1:truncrangesamples);%发射脉冲sig=变送器(sig);%向目标发射脉冲sig =散热器(sig, targetAngle);%将脉冲传播到自由空间中的点目标sig=信道(sig、雷达目标、目标位置、雷达目标、目标电平);%将脉冲反射到目标上sig =目标(团体);%收集天线上的反射脉冲sig=收集器(sig,目标角);%接收信号rxsig(:,ii)=接收机(sig);终止kc=(2*pi*fc)/c;补偿多普勒由于斜视角度rxsig=rxsig.*exp(-1i.*2*(kc)*sin(deg2rad(squingtangle))*repmat(速度*eta1,1,trunchangesamples));
将接收到的信号可视化。
现在可以将接收到的信号可视化为在横向距离方向上发射的多个脉冲的集合。图中显示了两个目标信号的实部。由于天线的斜视角度,啁啾出现倾斜。
显示亮度图像(真实(rxsig))、标题(“SAR原始数据”)包含(“交叉范围样本”) ylabel (“范围样本”)
执行范围压缩。
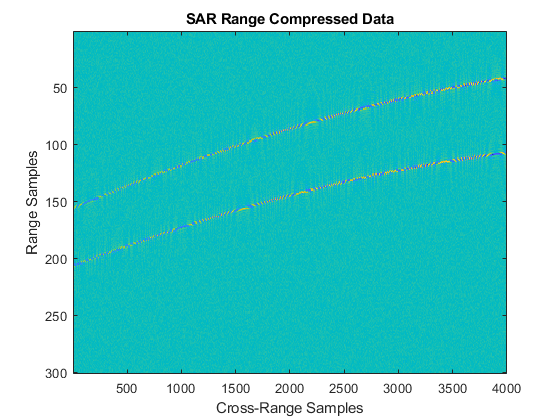
距离压缩将有助于在50 MHz带宽下实现所需的距离分辨率。
pulseCompression =分阶段。RangeResponse (“RangeMethod”,匹配滤波器的,“PropagationSpeed”C“采样器”fs);matchingCoeff = getMatchedFilter(波形);[cdata, rngrid] = pulseccompression (rxsig, matchingCoeff);
下图显示了对接收信号进行距离压缩后的响应。两目标的相位历史沿横向距离方向清晰可见,实现了距离聚焦。
imagesc(real(cdata(800:1100,:));头衔(“SAR距离压缩数据”)包含(“交叉范围样本”) ylabel (“范围样本”)
方位压缩
距离压缩完成后,有多种技术可以处理跨距离数据并从SAR原始数据中获得最终图像。本质上,距离压缩有助于在快速时间或距离方向上实现分辨率,而跨距离方向上的分辨率是通过方位角或跨距离压缩实现的。距离本例演示了斜视情况下的偏移算法。方位聚焦需要考虑天线倾斜引起的斜视。
rma\u processed=helperSquintRangeMigration(cdata、fastTime、fc、fs、prf、速度、numpulse、c、Rc、squintangle);
可视化最终的SAR图像。
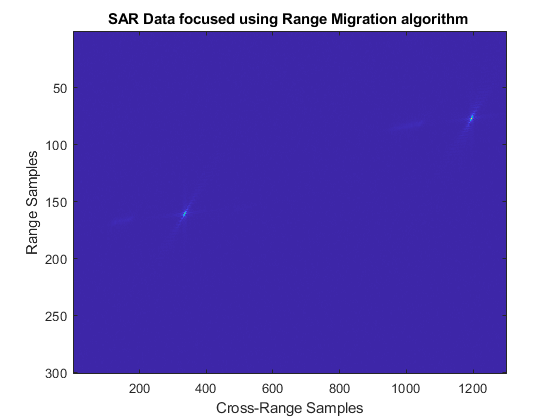
使用距离偏移算法绘制聚焦SAR图像。仅显示通过距离偏移算法形成的图像的一部分能够准确地指出目标的位置。[1]、[2]和[3]所示的距离偏移提供了交叉轨迹和沿轨迹方向的理论分辨率。
图(2);图像(abs(rma_处理(2300:36001100:1400));标题(“使用距离偏移算法聚焦SAR数据”)包含(“交叉范围样本”) ylabel (“范围样本”)
总结
此示例演示如何在机载数据采集场景中利用LFM信号模拟和开发斜视模式聚束SAR处理。该示例还演示了通过改进的距离偏移算法从接收信号生成图像,以处理斜视造成的影响。
参考文献
Cafforio,C.,Prati,C.和Rocca,F.,1991。使用地震偏移技术聚焦SAR数据。IEEE航空航天和电子系统交易,27(2),pp.194-207。
苏梅克,M.,1999。使用MATLAB算法的合成孔径雷达信号处理。约翰·威利父子公司。
Stolt,R.H.,利用傅里叶变换技术进行偏移,地球物理学,1978年,第43页,第23-48页
附录
距离偏移算法
函数azcompresseddata = helperSquintRangeMigration (sigData fastTime, fc、fs、脉冲重复频率、速度、numPulses, c, Rc, squintangle)
该函数演示了用于成像侧视合成孔径雷达的距离偏移算法。该算法考虑了脉冲压缩合成孔径数据。
设置范围频率跨度。
频率范围=linspace(fc fs/2,fc+fs/2,长度(快速时间));krange=2*(2*pi*频率范围)/c;
设置交叉范围波数。
kaz = 2π* * linspace(脉冲重复频率/ 2,脉冲重复频率/ 2,numPulses)。/速度;
生成交叉范围波数矩阵,以匹配接收到的二维SAR信号的大小
kc = 2 *π* fc / 3 e8;kazimuth = kaz。”;与= 2 * (kc) * sin(函数(squintangle));kx = krange。^ 2 - (kazimuth +与)^ 2;
波数已修改,以适应斜视引起的偏移,并实现方位聚焦。
thetaRc =函数(squintangle);kx =√kx。* (kx > 0));我kFinal = exp (1 * (kx。* cos (thetaRc) + (kazimuth)。* sin (thetaRc))。* Rc);kfin = kx。* cos (thetaRc) + (kazimuth +与)。*罪(thetaRc);
对范围压缩信号执行二维FFT。
sdata=fft移位(fft(fft移位)(fft(sigData,[],1),1),[],2);
执行批量压缩以获得参考范围内的方位压缩。使用新的交叉范围波数对二维FFT信号进行滤波,以在参考范围内实现完全聚焦,并作为副产品,对不在参考范围内的目标进行部分聚焦。
fsmPol=(sdata.)*kFinal;
对不在参考范围内的目标执行Stolt插值以实现聚焦
stoltPol=fsmPol;对于i=1:size((fsmPol),1)stoltPol(i,:)=interp1(kfin(i,:),fsmPol(i,:),krange(1,:);终止stoltPol(isnan(stoltPol))=1e-30;azcompresseddata=ifftshift(ifft2(stoltPol),2);终止
你也可以从以下列表中选择一个网站: