importrobot
Urdfファereplicationル,sdfファereplicationル,テキストまたはSimscape多体モデルから剛体リモデルをンポト
構文
説明
UrdfまたはSDFの
机器人= importrobot (文件名)文件名によって指定された统一机器人描述格式(URDF)または仿真描述格式(SDF)ファeconfルを解析することにより,rigidBodyTreeオブジェクトを返します。
机器人= importrobot (___,名称,值)
Simscape多体モデルの邮箱ンポ邮箱ト
[は,Simscape™多体™モデルをンポトして,等価の机器人,importInfo= importrobot(模型)rigidBodyTreeオブジェクトおよび邮箱ンポ邮箱トに関する情報をimportInfoに返します。出力されるrigidBodyTreeオブジェクトでは,固定ジョereplicationント,直進ジョereplicationントおよび回転ジョereplicationントのみがサポトされています。
[は,前述の構文からのSimscape多体モデルに加え,1以上の名前と値のペアの引数を使用してオプションを指定します。その他のジョopenstackントタopenstackプ,拘束ブロックまたは可変慣性を使用するモデルをopenstackンポopenstackトするには,Simscape Multibodyモデルのンポンポトの名前と値のペアを使用します。机器人,importInfo= importrobot(___,名称,值)
例
Urdfファ
UrdfファルをrigidBodyTreeオブジェクトとして邮箱ンポ邮箱トします。
机器人= importrobot(“iiwa14.urdf”)
robot = rigidBodyTree属性:NumBodies: 10 Bodies: {1x10 cell} Base: [1x1 rigidBody] BodyNames: {1x10 cell} BaseName: 'world' Gravity: [0 0 0] DataFormat: 'struct'
显示(机器人)
ans = axis (Primary) with properties: XLim: [-1.5000 1.5000] YLim: [-1.5000 1.5000] XScale: 'linear' YScale: 'linear' GridLineStyle: '-' Position: [0.1300 0.1100 0.7750 0.8150] Units: 'normalized'显示所有属性
Urdf文字ベクトルからのロボットのンポト
Urdf文字ベクトルを指定します。この文字ベクトルは,有効なロボットモデルを作成するための必要最低限の記述です。
URDFtext =' < ?xml version = " 1.0 " ? > <机器人的名字=“min”> <链接name = " 10 " / > < /机器人>”;
ロボットモデルを邮箱ンポ邮箱トします。この記述では,“10”というロボットベスリンクのみをもigidBodyTreeオブジェクトが作成されます。
robot = importrobot(URDFtext)
robot = rigidBodyTree,属性:NumBodies: 0 Bodies: {1x0 cell} Base: [1x1 rigidBody] BodyNames: {1x0 cell} BaseName: 'L0' Gravity: [0 0 0] DataFormat: 'struct'
ビジュアルジオメトリを使用したロボットモデルの表示
ロボットのビジュアルジオメトリを記述するために,统一机器人描述格式(URDF)ファイルと関連付けられた.stlファ。各剛体には,個別のビジュアルジオメトリが指定されています。関数importrobotは,urdfファ。関数は,ロボットのビジュアル ジオメトリと衝突ジオメトリが同じであると想定し、対応するボディの衝突ジオメトリとしてビジュアル ジオメトリを割り当てます。
関数显示を使用して,图内でロボットモデルのビジュアルジオメトリと衝突ジオメトリを表示します。その後,コンポーネントをクリックして検査したり,右クリックして表示状態を切り替えたりして,モデルを操作できます。
ロボットモデルをurdfファ。.stlファルの場所が,このurdf内で正しく指定されていなければなりません。他の.stlファルを個別の剛体に追加する方法の詳細にいては,addVisualを参照してください。
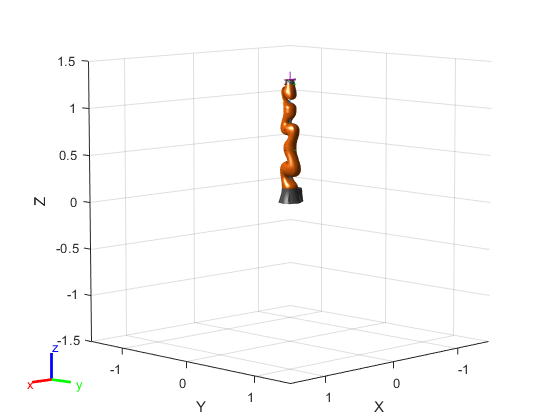
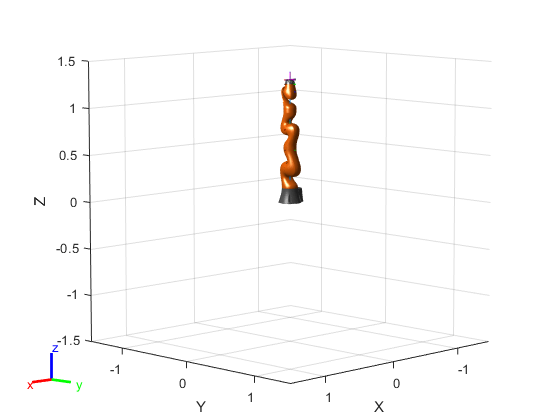
机器人= importrobot(“iiwa14.urdf”);
関連付けられたビジュアルモデルを使用してロボットを可視化します。ボディまたは座標系を検査するには,それらをクリックします。各ビジュアルジオメトリの表示状態を切り替えるには,ボディを右クリックします。
表演(机器人,“视觉效果”,“上”,“碰撞”,“关闭”);
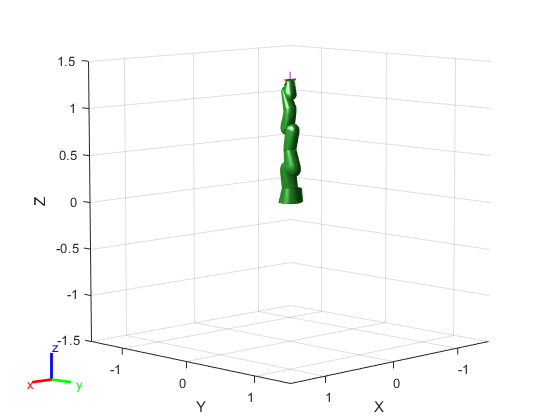
関連付けられた衝突ジオメトリを使用してロボットを可視化します。ボディまたは座標系を検査するには,それらをクリックします。各衝突ジオメトリの表示状態を切り替えるには,ボディを右クリックします。
表演(机器人,“视觉效果”,“关闭”,“碰撞”,“上”);
Simscape™Multibody™モデルのRigidBodyTreeオブジェクトへの邮箱ンポ邮箱ト
既存のSimscape™Multibody™ロボットモデルを,rigidBodyTreeオブジェクトとしてRobotics System Toolbox™に。
Simscape™Multibody™モデルを開きます。これはヒュマノ。
open_system (“example_smhumanoidrobot.slx”)
モデルを邮箱ンポ邮箱トします。
[robot,importInfo] = importrobot(gcs)
robot = rigidBodyTree with properties: NumBodies: 21 Bodies: {1x21 cell} Base: [1x1 rigidBody] BodyNames: {1x21 cell} BaseName: 'Base' Gravity: [0 0 -9.8066] DataFormat: 'struct'
SourceModelName: 'example_smhumanoidrobot' RigidBodyTree: [1x1 RigidBodyTree] blockconverversioninfo: [1x1 struct]
作成されたrigidBodyTreeオブジェクトに関する詳細を表示します。
showdetails (importInfo)
-------------------- 机器人:(21)尸体Idx身体名字仿真软件源块联合仿真软件源金宝app块联合类型父母名字(Idx)孩子的名字(s ) --- --------- ---------------------- ---------- ---------------------- ---------- ---------------- ---------------- 1 Body01信息| | |突出Joint01信息列表|突出转动基地(0)Body02 (2) 2 Body02信息| | |突出Joint02信息列表|突出转动Body01 (1) Body03 (3) 3 Body03信息| | |突出Joint03信息列表|亮点转动Body02 (2) Body04 (4) 4 Body04信息| | |突出Joint04信息列表|突出转动Body03 (3) 5 Body05信息| | |突出Joint05信息列表|突出转动基地(0)Body06 (6) 6 Body06信息| | |突出Joint06信息列表|突出转动Body05 (5) Body07 (7) 7 Body07信息| | |突出Joint07信息列表|突出转动Body06 (6) Body08 (8) 8 Body08信息| | |突出Joint08信息列表|突出转动Body07 (7) | | 9 Body09信息列表突出Joint09信息列表| |突出转动基地(0)Body10 (10) 10 Body10信息| | |突出Joint10信息列表|突出转动Body09 (9) Body11 (11) 11 Body11信息| | |突出Joint11信息列表|突出转动Body10 (10) Body12 (12) 12 Body12信息| | |突出Joint12信息列表|突出转动Body11 (11) 13 Body13信息| | |突出Joint13信息列表|突出转动基地(0)Body14 (14) 14 Body14信息列表| |突出Joint14信息| |列表突出转动Body13 (13) Body15 (15) 15 Body15信息| | |突出Joint15信息列表|突出转动Body14 (14) Body16 (16) 16 Body16信息| | |突出Joint16信息列表|突出转动Body15 (15) 17 Body17信息| | |突出Joint17信息列表|突出转动基地(0)Body18 (18) 18 Body18信息| | |突出Joint18信息列表|突出转动Body17 (17) Body19 (19) 19 Body19信息| | |突出Joint19信息列表|强调固定Body18 (18)Body20(20) 20 Body20 Info | List | Highlight Joint20 Info | List | Highlight fixed Body19(19) 21 Body21 Info | List | Highlight Joint21 Info | List | Highlight fixed Base(0) --------------------
入力引数
出力引数
ヒント
ビジュアルメッシュを含むロボットモデルをンポトするとき,関数importrobotは,各剛体に割り当てる.stlまたは.daeファルを,以下の規則を使用して検索します。
この関数は,生メッシュパスで,urdfまたはSTFファeconfルの指定された剛体を検索します。Rosパッケジへの参照で
包:\ \ < pkg_name >が削除されます。絶対パスは,変更なしで直接チェックされます。
相対パスは,以下のディレクトリを順番に使用してチェックされます。
ユザ指定の
MeshPath現在のフォルダ
MATLAB®パス
UrdfまたはSDFファ
UrdfまたはSDFファ1
UrdfまたはSDFファereplicationル内のメッシュパスからのファereplicationル名が,
MeshPath入力引数に付加されます。
メッシュファrigidBodyTreeオブジェクトを返します。
バジョン履歴
您也可以从以下列表中选择网站: